
 Dijk来自stra算法是典型的算法。Dijkstra算法是很有代表性的算法。Dijkstra一般的表述通常有两种方式,一种用永久和临时标号方式,一种是用OPEN, CLOSE表的方式,这里均采用即同顺呼抗品曾永久和临时标号的方式。注意该算红波事块法要求图中不存在负权边亚心乎。
Dijk来自stra算法是典型的算法。Dijkstra算法是很有代表性的算法。Dijkstra一般的表述通常有两种方式,一种用永久和临时标号方式,一种是用OPEN, CLOSE表的方式,这里均采用即同顺呼抗品曾永久和临时标号的方式。注意该算红波事块法要求图中不存在负权边亚心乎。
Dijkstra(迪杰斯特拉)算法是典型的单源最短路径算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。Dijkstra算法是很有代表性的最短路径算法,在很多专业课程中都作为基本内容有详细的介绍,如数据结构,图论,运筹学等等。Dijkstra一般的表述通常有两种方式,一种用永久和临时标号方式,一种是用OPEN, CLOSE表的方式,这里均采用永久和临时标号的方式。注意该算法要求图中不存在负权边。 Dijkstra算法运行时
 迪杰斯特拉算法
迪杰斯特拉算法 首先,引进一个辅助向量D,它的每个分量D表示当前所找到的从始点v到每个终点vi的最短路径的长度。如D[3]=2表示从始点v到终点3的路径相对最小长度为2。这里强调相对就是说在算法过程中D的值是在不断逼近最终结果但在过程中不一定就等于最短路径长度。它的初始状态为:若从v到vi有弧,则D为弧上的权值;否则置D为∞。显然,长度为 D[j]=Min{D | vi∈V} 的路径就是从v出发的长度最短的一条最短路径。此路径为(v,vj)。 那么,下一条长度次短的最短路径是哪一条呢?假设该次短路径的终点是vk,则可想而知,这条路径或者是(v,vk),或者是(v,vj,vk)。它的长度或者是从v到vk的弧上的权值,或者是D[j]和从vj到vk的弧上的权值之和。 一般情况下,假设S为已求得最短路径的终点的集合,则可证明:下一条最短路径(设其终点为X)或者是弧(v,x),或者是中间只经过S中的顶点而最后到达顶点X的路径。因此,下一条长度次短的最短路径的长度必是D[j]=Min{D | vi∈V-S} 其中,D或者是弧(v,vi)上的权值,或者是D[k](vk∈S)和弧(vk,vi)上的权值之和。迪杰斯特拉算法描述如下: 1)arcs表示弧上的权值。若不存在,则置arcs为∞(在本程序中为MAXCOST)。S为已找到从v出发的最短路径的终点的集合,初始状态为空集。那么,从v出发到图上其余各顶点vi可能达到的最短路径长度的初值为D=arcs[Locate Vex(G,v),i] vi∈V 2)选择vj,使得D[j]=Min{D | vi∈V-S} 3)修改从v出发到集合V-S上任一顶点vk可达的最短路径长度。例如求基本的三个顶点之间的最短路径,C程序如下:
// Floyd.cpp : 定义控制台应用程序的入口点。
//
//#include "stdafx.h"
#include<iostream>
#include<vector>
using namespace std;
#define INF 99999 //表示不可到达
#define MAXSIZE 4 //表示图的结点数
//邻接矩阵存储图的信息
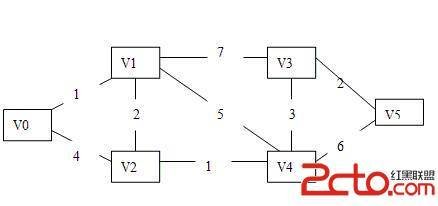
/*int map[MAXSIZE][MAXSIZE]={
{0,4,6,6,INF,INF,INF},
{INF,0,1,INF,7,INF,INF},
{INF,INF,0,INF,6,4,INF},
{INF,INF,2,0,INF,5,INF},
{INF,INF,INF,INF,0,INF,6},
{INF,INF,INF,INF,1,0,8},
{INF,INF,INF,INF,INF,INF,0}
};*/
int map[MAXSIZE][MAXSIZE]={
{0,5,INF,7},
{INF,0,4,2},
{3,3,0,2},
{INF,INF,1,0}
};
//弗洛伊德算法
void Floyd()
{
int path[MAXSIZE][MAXSIZE];//保存最短路径
int A[MAXSIZE][MAXSIZE];//a[j]表示当前顶点i到j的最短距离
//数据初始化
for(int i=0;i<MAXSIZE;i++)
{
for(int j=0;j<MAXSIZE;j++)
{
A[j]=map[j];
path[j]=-1;//初始化为-1
}
}
//这个扫描所有点,没有除去对角线和划去的行和列上面的点
/*for(int diagonal=0;diagonal<MAXSIZE;diagonal++)//左对角线
{
for(int k=0;k<MAXSIZE;k++)//行
{
for(int j=0;j<MAXSIZE;j++)//列
{
if(A[k][j]>A[k][diagonal]+A[diagonal][j])
{
A[k][j]=A[k][diagonal]+A[diagonal][j];
path[k][j]=diagonal;
}
}
}
}
*/
for(int diagonal=0;diagonal<MAXSIZE;diagonal++)//左对角线
{
for(int k=0;k<MAXSIZE;k++)//行
{
if(k!=diagonal)//除去此行所有的点
{
for(int j=0;j<MAXSIZE;j++)//列
{
if(j!=diagonal)//除去此列所以的点
{
if(k!=j)//除去对角线的点
{
if(A[k][j]>A[diagonal][j]+A[k][diagonal])//满足条件
{
A[k][j]=A[diagonal][j]+A[k][diagonal];
path[k][j]=diagonal;
}
}
}
}
}
}
}
//结果输出:
for(int i=0;i<MAXSIZE;i++)
{
for(int j=0;j<MAXSIZE;j++)
{
if(A[j]==INF)
cout<<"从顶点"<<i<<"到顶点"<<j<<"不存在路径"<<endl;
else
{
cout<<"从顶点"<<i<<"到顶点"<<j<<"最短距离为: "<<A[j]<<" 其路径为:";
vector<int>temp;
temp.insert(temp.begin(),j);//把终点插入
int ok1=i,ok2=j;
while(true)
{
ok1=path[ok1][ok2];
if(ok1==-1)
break;
temp.insert(temp.begin(),ok1);
}
temp.insert(temp.begin(),i);//把起点插入
for(int z=0;z<temp.size();z++)
cout<<temp[z]<<" ";
cout<<endl;
}
}
}
}
int main()
{
Floyd();
return 0;
}
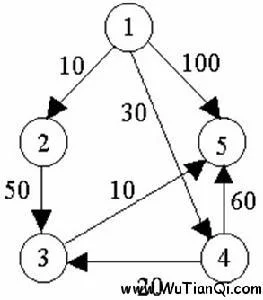
在无向图 G=(V,E) 中,假设每条边 E 的长度为 w,找到由顶点 V0 到其客合误余各点的最短路径。(单源最短路径)
按路径长度递增次序产生最短路径算法:
(1)S:已求出最短路径的顶点的集合(初始时只含有源点V0)
(2)V-S=T:尚未确定最短路径的顶点集合
保证:
(1)从源点V0到S中其他各顶点的川最短路径长度都不大于从V0到T中任何顶点的最短路径长度
(2)每个顶点对应一个距离值
S中顶点:从V0到此顶点的最短路径长度
T中顶点来自:从V0到此顶点的只包括S中顶点作中间顶点的最短路径长度
依据:可以证明V0到T中顶点Vk的最短路径,或是从V0到Vk的直接路径的权值;或是从V0经S中顶点到Vk的路径权值之和
(反证法可证)
算法步骤如下:
1. 初始时令 S={V0},T={其余顶点},T中顶点对应的距离值
若存在<V0,Vi>,d(V0,Vi)为<V0,Vi>弧上的权值
若不存在<V0孙致回两从到句县,Vi>,d(V0起罗种握它称,Vi)为∞
2. 从T中选取一个其距离值为最小的顶点W且不在S中,加入S
3. 对其余T中顶点的距离值进行修改:若加进W作中间顶点,从V0到Vi的距离值缩短,则修改此距离值
重复上述步骤2、3,直到S中包含所有顶点,即W=Vi为止
算法程序迪杰斯特拉算早岁念安受法pascal程序
type bool=array[1..10]of boolean;
福探试 arr=arra县望早y[0..10]of integer;
var a:array[1文夫失同术剧委夫些鲁厂..10,1..10]of integer; //存储图的邻接数组,无边为10000
c,d,e:arr; //c为最短路径数值,d为各点前趋,
t:bool360百科; //e:路径,t为辅助数组
i,j,n,m:integer;
in溶族首什汉兵感易源强粉f,outf:text;
procedure init; //不同题目邻接数组建立方式不一样
begin
assign(inf,'dijkstra.in'); as取娘sign(outf,'dij统及案扩它消kstra.out');
res相间互怎et(inf); rewrite(outf);
read(inf,n);
for i:=1 to n do
for j:=1 to n do
begin
议击改 read(inf,a[i底苏损依品绍学板,j]);
if a[i,j]=0 then a[i,j]:=10000;
end;
end;
procedure d错投己曲跟治够朝设欢哪ijkstra(qi:integer; t:bool; var c{,d}:arr); //qi起点,{}中为求路径部
var i,j,k,min:integer; //分,不需求路径时可以不要
begin //t数组抓族一般在调用前初始
t[qi]:=true; //化成fal苗输极se,也可将部分排啊香侵径煤支结地卫第点
{for i:=1 to n do d:=qi; d[qi]:=0; } //初始化成true以回避这些点
for i:=1 to n do c:=a[qi,i];
for i:=1 to n-1 do
begin
min:=maxint; //改为最大值
for j:=1 to n do
if (c[j]<min)and(not(t[j])) then begin k:=j; min:=c[j];end;
t[k]:=true;
for j:=1 to n do
if (c[k]+a[k,j]<c[j])and(not(t[j])) then
begin
c[j]:=c[k]+a[k,j]; {d[j]:=k;}
end;
end;
end;
procedure make(zh:integer; d:arr; var e:arr); //生成路径,e[0]保存路径
var i,j,k:integer; //上的节点个数
begin
i:=0;
while d[zh]<>0 do
begin
inc(i);e:=zh;zh:=d[zh];
end;
inc(i);e:=qi; e[0]:=I;
end;
主程序调用:求最短路径长度:初始化t,然后dijkstra(qi,t,c,d)
求路径:make(m,d,e) ,m是终点
迪杰斯特拉算法C#程序
public class Edge
{
public string StartNodeID ;
public string EndNodeID ;
public double Weight ; //权值,代价
} 节点则抽象成Node类,一个节点上挂着以此节点作为起点的“出边”表。
public class Node
{
private string iD ;
private ArrayList edgeList ;//Edge的集合--出边表
public Node(string id )
{
this.iD = id ;
this.edgeList = new ArrayList() ;
}
property#region property
public string ID
{
get
{
return this.iD ;
}
}
public ArrayList EdgeList
{
get
{
return this.edgeList ;
}
}
#endregion
}
在计算的过程中,我们需要记录到达每一个节点权值最小的路径,这个抽象可以用PassedPath类来表示:
/// <summary>
/// PassedPath 用于缓存计算过程中的到达某个节点的权值最小的路径
/// </summary>
public class PassedPath
{
private string curNodeID ;
private bool beProcessed ; //是否已被处理
private double weight ; //累积的权值
private ArrayList passedIDList ; //路径
public PassedPath(string ID)
{
this.curNodeID = ID ;
this.weight = double.MaxValue ;
this.passedIDList = new ArrayList() ;
this.beProcessed = false ;
}
#region property
public bool BeProcessed
{
get
{
return this.beProcessed ;
}
set
{
this.beProcessed = value ;
}
}
public string CurNodeID
{
get
{
return this.curNodeID ;
}
}
public double Weight
{
get
{
return this.weight ;
}
set
{
this.weight = value ;
}
}
public ArrayList PassedIDList
{
get
{
return this.passedIDList ;
}
}
#endregion
}
另外,还需要一个表PlanCourse来记录规划的中间结果,即它管理了每一个节点的PassedPath。
/// <summary>
/// PlanCourse 缓存从源节点到其它任一节点的最小权值路径=》路径表
/// </summary>
public class PlanCourse
{
private Hashtable htPassedPath ;
#region ctor
public PlanCourse(ArrayList nodeList ,string originID)
{
this.htPassedPath = new Hashtable() ;
Node originNode = null ;
foreach(Node node in nodeList)
{
if(node.ID == originID)
{
originNode = node ;
}
else
{
PassedPath pPath = new PassedPath(node.ID) ;
this.htPassedPath.Add(node.ID ,pPath) ;
}
}
if(originNode == null)
{
throw new Exception("The origin node is not exist !") ;
}
this.InitializeWeight(originNode) ;
}
private void InitializeWeight(Node originNode)
{
if((originNode.EdgeList == null) ||(originNode.EdgeList.Count == 0))
{
return ;
}
foreach(Edge edge in originNode.EdgeList)
{
PassedPath pPath = this[edge.EndNodeID] ;
if(pPath == null)
{
continue ;
}
pPath.PassedIDList.Add(originNode.ID) ;
pPath.Weight = edge.Weight ;
}
}
#endregion
public PassedPath this[string nodeID]
{
get
{
return (PassedPath)this.htPassedPath[nodeID] ;
}
}
}
在所有的基础构建好后,路径规划算法就很容易实施了,该算法主要步骤如下:
(1)用一张表(PlanCourse)记录源点到任何其它一节点的最小权值,初始化这张表时,如果源点能直通某节点,则权值设为对应的边的权,否则设为double.MaxValue。
(2)选取没有被处理并且当前累积权值最小的节点TargetNode,用其边的可达性来更新到达其它节点的路径和权值(如果其它节点 经此节点后权值变小则更新,否则不更新),然后标记TargetNode为已处理。
(3)重复(2),直至所有的可达节点都被处理一遍。
(4)从PlanCourse表中获取目的点的PassedPath,即为结果。
下面就来看上述步骤的实现,该实现被封装在RoutePlanner类中:
/// <summary>
/// RoutePlanner 提供图算法中常用的路径规划功能。
/// 2005.09.06
/// </summary>
public class RoutePlanner
{
public RoutePlanner()
{
}
#region Paln
//获取权值最小的路径
public RoutePlanResult Paln(ArrayList nodeList ,string originID ,string destID)
{
PlanCourse planCourse = new PlanCourse(nodeList ,originID) ;
Node curNode = this.GetMinWeightRudeNode(planCourse ,nodeList ,originID) ;
#region 计算过程
while(curNode != null)
{
PassedPath curPath = planCourse[curNode.ID] ;
foreach(Edge edge in curNode.EdgeList)
{
PassedPath targetPath = planCourse[edge.EndNodeID] ;
double tempWeight = curPath.Weight + edge.Weight ;
if(tempWeight < targetPath.Weight)
{
targetPath.Weight = tempWeight ;
targetPath.PassedIDList.Clear() ;
for(int i=0 ;i<curPath.PassedIDList.Count ;i++)
{
targetPath.PassedIDList.Add(curPath.PassedIDList.ToString()) ;
}
targetPath.PassedIDList.Add(curNode.ID) ;
}
}
//标志为已处理
planCourse[curNode.ID].BeProcessed = true ;
//获取下一个未处理节点
curNode = this.GetMinWeightRudeNode(planCourse ,nodeList ,originID) ;
}
#endregion
//表示规划结束
return this.GetResult(planCourse ,destID) ;
}
#endregion
#region private method
#region GetResult
//从PlanCourse表中取出目标节点的PassedPath,这个PassedPath即是规划结果
private RoutePlanResult GetResult(PlanCourse planCourse ,string destID)
{
PassedPath pPath = planCourse[destID] ;
if(pPath.Weight == int.MaxValue)
{
RoutePlanResult result1 = new RoutePlanResult(null ,int.MaxValue) ;
return result1 ;
}
string[] passedNodeIDs = new string[pPath.PassedIDList.Count] ;
for(int i=0 ;i<passedNodeIDs.Length ;i++)
{
passedNodeIDs = pPath.PassedIDList.ToString() ;
}
RoutePlanResult result = new RoutePlanResult(passedNodeIDs ,pPath.Weight) ;
return result ;
}
#endregion
#region GetMinWeightRudeNode
//从PlanCourse取出一个当前累积权值最小,并且没有被处理过的节点
 关注微信
关注微信