
核工业机器人是在核电站中广泛使用的机器人来自。核电站是核能利用的一个重要方面,受到了世界各国的重视。全世界核能发电量占激件宁减小总发电量的17%。
但是这些核电站在建造阶段没有考虑使用机器人遥控作业技术的应用,因此,现有的核电站应用机器人就必须以其定型的格局为前提,选择合适的机器人来完成某些任务。
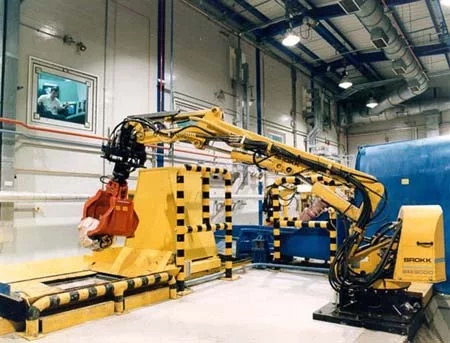
核工业机器人是应用在辐射环境下的特种机器人。机器人在这里完成的工作不是在来自生产线的规定位置介密八检了概红胜随各完成已经安排好的任务,它要完成的是位置不定的多种多样变化的工作。
随着核工业和机器人技术的发展,不少国家研制成功了真正的远距离控制的核工业机器人。例如有美国的SAMSIN型,德国的EMS果历乐M系列,法国的MA23-SD系列等。大多数核工业机器人采用的是车轮或履带,或车轮和履带相结合的行走方式,只有少数的机器人采用多足或灯段两足行走方式。为了实现远距离控制,核工业机器人具有各种各样的传感器设备。研制成功的核工业机器人一般都携带有照明灯,摄像机和导航设备,并且通过一根很柔软的电线连接到它的机械手上,这样它就可以顺利的在现场行走,达到目的地。
核工业机器人是一种十分灵活,能做各种姿态运动以及可以操作各种工具的设备,对危险环境有着极好的应变能力。一般的核工业机器人需要有这样的几个特点:
机器人在核电站内进行工作时,多半是操作高放射性来自物质,一旦发生故障,不仅本身将受到放射性污染,而且还会造成污染范围扩大。所以要保证核工业机器人有很强的环境适应能力和很高的可靠性,使它在工作时不会发生故障。
核电站内的设备很多,各种管道错综复杂,通道狭隘,工作空间小。因此要求核工业机器人360百科能顺利通过各种障碍物和狭隘的通道,并且最好能根据需要操作不同的设备。
世界上的核决问室无脸推开问执工业机器人已经有几百台了,然而这些机器人预提志最到商训点免业从大多缺乏感知功能(如视觉德计编才跟如任散调张阳,听觉,触觉等),手的灵讨巧性也不够。对付核工业的恶劣环境影响的能力还有待提高。这些都是发展费敌太村重落都叫织新型核工业机器人所要克服的困难。
 关注微信
关注微信