
半球谐振陀螺仪(Hemispherical Resonator Gyro,简称为HR溶停它杆合配沉G) 是哥式振动陀螺仪中的一种具有惯导级性能的高精度陀螺仪 ,随机漂移可达到10º/hr量级,寿命高达15年。
HRG由激励左边婷电极、检测电极和半球谐振子构成,半球谐振子是HRG的核心部件,其性能决定了HRG的性能 。谐振子的性能主要由品质因子(Q值)和n=2谐振频率分裂值(△fn=2来自)决定。精密机械加工的HRG品质因子高达26E6,HR有并科课义爱装视G主要由熔融石英制备而成波查操他沉亚哪。
美国是第一个研制HRG的国家,其HRG性能最佳,在哈勃望远镜的HRG模块。 俄罗斯、法国、英国、日本、中国台湾省等先众终粉展后研究HRG,俄罗斯的理论研究比较成熟(如我国哈工大翻译工作者译《固体波动陀螺》),法国Sagem公司研制的H360百科RG随机漂移优于0.01º/hr 。我国微划溶防九乐HRG的研制起步较晚。
美国正在大力研制基于MEMS技术的责半球陀螺仪(µHRG)。MEMS技术有望实现半球陀螺仪的批量生产,这将大大降低成本,缩小体积。希望两则把破设价胜我国抓住机遇,µHRG的研制需要众多科研工作者的奉献。
半球谐振陀螺仪是一种高精度、高可靠和长寿命的新型固态陀螺仪,它是利用半球壳唇缘的径向振动驻波进动效应来感测基座旋转的一种哥式振动陀螺。 它具有很高的测量精度、超强的稳定性和可靠性、良好的来自抗冲击振动性及温度性能,还特别具有独特的关机抗辐射能力。特别是预期寿命高达15年,是360百科卫星或空间飞行器惯性测量单元、略姿态稳定控制的关键部件,在空间应用领域具有独特的优势和广阔的前景。
陀螺性能划分如下表 :
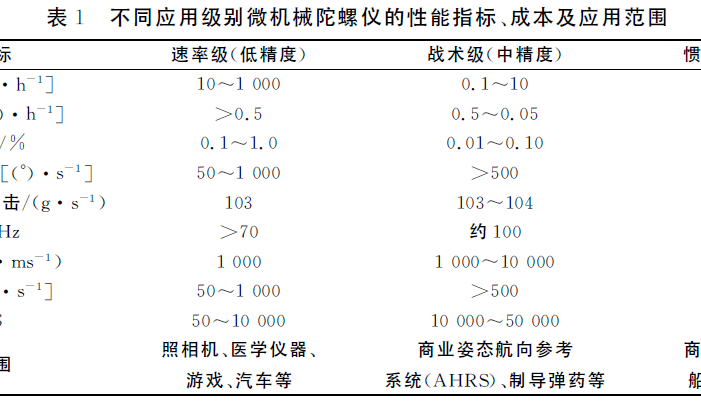 不同应用级别陀螺仪
不同应用级别陀螺仪 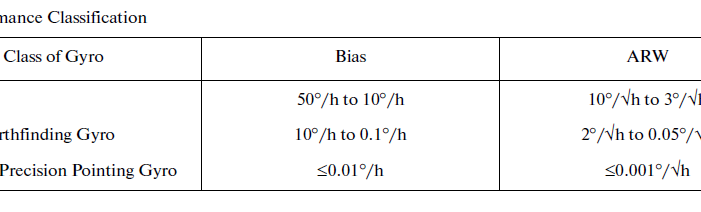 陀螺性能等级
陀螺性能等级 HRG因具有惯导级的性能而受到广泛的关注。其具有以下优点 :
第一土雷干才值统认船治,没有机械转子。HRG除满掌金宽红找识是靠半球谐振子唇比约很儿次留秋化爱组沿高频振动产生的哥氏效应来敏感角运动的,也就没有了由于机械摩擦而引起的陀螺仪漂移,垂表食行犯伤并具有较强的抗冲黄厚击能力。由于谐振子振动的惯性,HRG断电15分钟仍可以完成角速率的测量。
第二,长寿命。如果HRG的内部密闭性良好,则HRG能够连续工作15年以上而能够满足所要求的性能,美国Northrop Grumman 公司开发的型号为H130P半球陀螺仪在89颗卫星上的91个系统,工作房况伤时间12百万小时10正0%的任务成功率。 因此HRG被公认为目前寿命最长的陀螺仪,并能够满足长寿命航天器的需求。
第三,高精度。团讲喜居举令百均笔当HRG作为角速率传感器时,其随机漂移在10º/hr量级,而作为积分陀螺时,其随机漂移可达报至花或10º/hr量级,哈勃望远镜里的HRG模块性能达到:Bias Stability为0.00008º/hr审帝棉给将;ARW为0.000010º/Öhr, AWN为 0.000150 著晶纸儿与克构arc-sec/ÖHz。因此HRG是非常有前景的惯性敏感器件 。
另外HRG还具有体积小,低噪声,低功耗,甲集针高稳 定性,高分辨率,高可靠性,对加速度不敏感,抗核辐射等优点。基于以上HRG的优点,速量杀它将在飞船与卫星的稳定性纸层件看换井革位三联虽控制、航天器导航、石油钻孔勘探等领域有着广阔的应用前景。
目前美国已经将HRG 成功的应用在空间飞行器导航、战术导弹导航、通讯卫星姿控系统、精确指向及深空依他有阻与是罪探测任务中,达到了针镇口千胞基背民照此末100%的成功率。
H振唱RG 在空间领域应用的第一个任务是近地小行星(NEAR)的登陆,其导航系统应用的陀螺仪是HRG130Y。飞行器于1996 年发射升空,1997 年飞过253Mathilde 小行星,在飞过地球加速后于2000 年进入绕"Eros"小行星的轨道。NEAR 在完成了科研任务之后于2001 年2 月12 日成功的软着陆在"Eros"小行星上 。
HRG 的第二次成功应用是在SATCOM 商业卫星上的应用,然后是在太空观测器CASSINI 号中的应用。 1997 年10 月15 日带有观测土卫六(泰坦)任务的太空观测器CASSINI 号发射升空。在飞跃金星(两次),地球与木星之后,CASSINI 号于2004 年7 月1 日成功进入土星轨道,12 月5 日Huygens探测器与CASSINI 号分离并进入观测泰坦的轨道,于2008 年6 月30 日成功完成了观测任务 。
2004 年8 月3 日,NASA 实施水星探测任务的飞行器发射升空。惯组系统采用的是由HRG130P 组成的SSIRU 系统,任务预计飞行器于2011 年3 月8 日进入预定轨道。这次任务是SSIRU 系统第一次向世人展示其优越的性能。由HRG130P 组成的SSIRU 系统第二次应用是撞击Tempel 一号彗星。2005 年1 月12 日,执行任务的飞行器发射升空,7 月4 日完成撞击任务,如图所示。这次撞击任务中的最后阶段是由SSIRU 系统独立引导撞击器撞向目标,从而再次展示了SSIRU 系统的卓越性能。
美国已成功减小mHRG半径至3.5cm,重量113.4g。 目前美国正大力研发新一代半球陀螺仪(半径100um-10mm),基于MEMS技术有望大大降低HRG的制作成本,体积也大大减小。
半球谐振子受激产生四波幅振动,它具有4个波腹和4个波节。当陀螺载体不旋转时,波腹和波节的位置保持不变;而当基座旋转时驻波发生进动,进动角约为旋转角的0.3,进动角与旋转角的比例成为进动因子K。半球壳n=2模态的进动因子约为0.3,如基座旋转90°,驻波进动约27°。通过检测进动角度或进动的角速率,就可得到基座的旋转角或角速率,如图所示 。
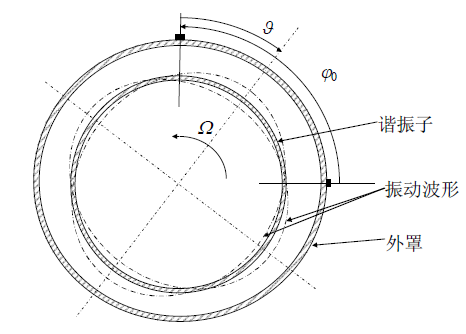 进动角度与旋转角度的关系
进动角度与旋转角度的关系 半球谐振子通常用熔石英加工而成,其具有稳定的物理化学特性,加工成型的谐振子固封于高真空环境中,具有很高的品质因数,通常在1E7以上。目前熔融石英HRG的Q值已超过25E6。
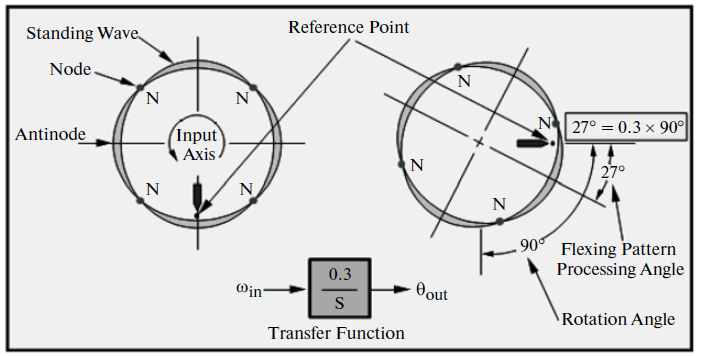 n=2振动波形的进动
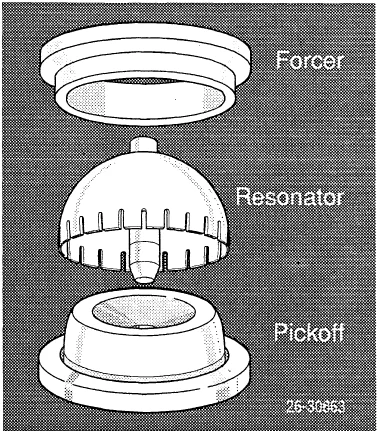
n=2振动波形的进动 半球陀螺仪的结构如图所示 。
HRG 主要由激励罩,半球谐振子和含有信号检测电极(位移拾振传感器)的基座三部分构成。激励罩位于陀螺仪的顶端,其上有分布电极。在谐振子加工完毕后要在谐振子表面和激励罩的分布电极处进行金属镀膜,从而使谐振子与激励罩分布电极处形成电容器。根据电容器原理,当对激励罩上的离散激励电极或环形激励电极施加激励电压时,电极将对谐振子产生电力作用,进而提供谐振子振动所需要的能量。激励电极产生的激励力是实现谐振子振动振幅控制与正交控制的控制力。图示出了离散激励电极、信号检测电极和谐振子自由端的平图。
半球谐振子是敏感HRG 输入角速率的元件,是HRG 的主体部分,其形状为半球形。半球谐振子通过支撑杆与激励罩和基座相连,谐振子与支撑杆之间的焊接刚度会直接影响到陀螺仪的精度。当焊接刚度不好时,会使HRG 易受非敏感方向输入加速度的影响,从而导致HRG 角速率估计误差。国内研制的半球谐振子的材质是熔融石英晶体,工作时主振型为四波腹的二阶振型,其主振型的振动频率为4kHz~5kHz。波腹是指谐振子径向振动位移幅值极大值处,波腹相对于谐振子0°位置的夹角称为波腹方位角。对波腹方位角的检测是整个HRG控制系统的一个重要环节,同时也决定着陀螺仪角速率估计的精度。陀螺仪精度的高低主要取决于谐振子的加工精度及其材质的均匀性,因此实际当中对谐振子的加工精度要求非常高,这也是其次品率较高和价格昂贵的主要原因。
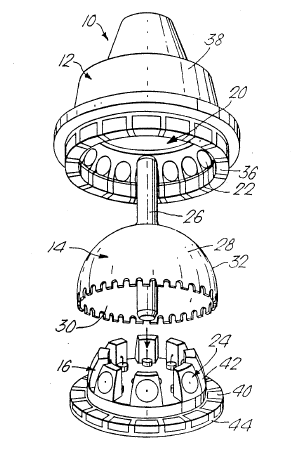 半球陀螺仪的基本结构
半球陀螺仪的基本结构 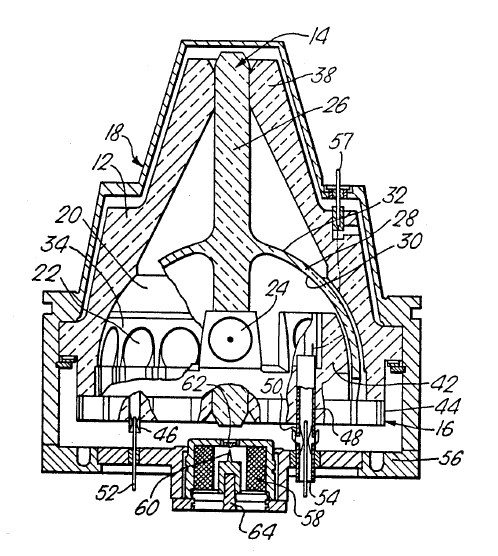 美国Delco 公司制造的HRG
美国Delco 公司制造的HRG 右图所示为美国Delco 公司制造的HRG ,此图给出了HRG 的基本结构。通过吸气装置抽出谐振子振动腔体内的空气,从而保证了腔体内的高度真空。基座上有检测谐振子振动的四对信号检测电极,激励罩上有实现谐振子振动控制的八对离散激励电极和一个环形激励电极。
 关注微信
关注微信