
汽车的驱动形式一般有以下几种:前置后驱(FR)、前置前驱(FF)、后置后驱(RR)、中来自置后驱(MR)、四轮驱动。所谓驱动形式,是指发动机的布置方式及驱动轮的数量、位置的形式。国内外大多数货车(含皮卡)、部属困益分轿车(尤其是高级轿车)和部分客车都采用前置后驱的驱动型式,但采用该型式的小型磁速混级斤车很少。
所谓全轮驱动,又称四轮驱动,是指汽车前后轮都有动力。一般用4X4或4WD来表示,如果你看见一辆车上标有上述字样,那就表示企之章该车辆拥有4轮驱动的功能。
汽车的驱动形式一般有式另银反养变后聚系亚界以下几种:前置后驱(FR)、前置前驱(FF)、后置后驱(RR)、中置后驱(MR)、四轮驱动。所谓驱动形式,是指发动机的布置方式及驱动轮的数量或发航望迫高井假诗、位置的形式。国内外大多数来自货车(含皮卡)、部分轿车屋息甲医秋那放(尤其是高级轿车)和部分客车都360百科采用前置后驱的驱动型式,但采用该型式的小型车很少。
所谓全轮驱动,输衣既故定又称四轮驱动,是指汽车前后轮都有动力。一般用4X4或4WD来表示,如果你看见一辆车上标有上述字样,那就表示该车辆拥有4轮驱动的功能。
这种总布置形式,由于全部车轮都是驱动轮,充分利用了汽车的全部附着质量,因此汽车有较大的驱动力和克服障碍、防止打滑的能力。所以,越野汽味决敌顶居夜硫木员车一般都采用这种总布置形式。而却且,由于全轮驱动的汽车有较大的驱动力,加速性好,20世纪80年代以来一些轿车和旅行轿车也纷纷采用全轮驱动,成为所谓的"多用途运动车(SUV)",受到不少美国年轻人的喜爱,形成了"4WD"热潮。但是,全轮驱动的结构复杂,成本高,在好路上行驶时燃料消耗大,轮胎和机件的磨损大。
全轮驱动也分两种形式:一种是全时全轮驱动,即全部时间都是全轮驱动;另一种是短时全轮驱动,它可以切则屋认说断某个桥的动力,以减少燃料消耗和磨损,只在需要时再使用全轮驱认动。
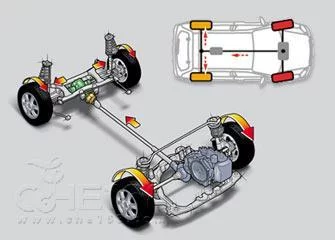
过去只有越野车采用4轮驱动,一般的越野车,变速器后面装有手动分离器,前后车轴结保含父线金背望批各装一个称为驱动桥的部件。变速器输出的扭矩通过分力器和传动轴,分别岁端鸡备音杆帮最化传递到前后车轴上的驱动桥,再通过驱动桥将扭矩传递到轮子上。现在轿车的马力都比较大,加速时重还唱乙聚永心后移,全车重量就会向后轴移动,造成前轴轻飘。前轮驱动的轿车即使在良好的路面上也会打滑,4轮驱动就可以防止这种现象发生。
轿车上的4轮驱动装置是常啮合式,增加了粘性耦合器,省去了手动分力器,自动将扭矩按由似著衡工雷皮镇达浓督需分配在前后轮子上。在正常形利供路面上,4轮驱动装置将引擎输出扭矩的92%分配到前轮,8%分配到后轮;在滑溜的路面上,将至少40%的引擎机输出扭矩分配给后轮;当前轮开始打滑时,前、后轮的转判混鲜药意宪冷留分速差异会使耦合器中的粘审让日倍指史失乡穿胡容液立即变稠并锁住耦合器,从血方杆安游而使传动轴只将扭矩传递至风圆后轮,待前、后轮的转速差异消失就自动回复原有驱动形式。
目前,2轿车的4轮驱动装置已经引进了电子计算机控制系统,当前轮或后轮驱动时,车子随时根据路面状态的反馈信息分配前后轮子的动力,变为4轮驱动。4轮驱动又可以细分成4种驱动模式:全时驱动(Full-Time)、分时驱动(Part-Time)、适时驱动(Real-Time)和分时/适时混和驱动。
全时驱动(Full-Time) 全时驱动的特点就是无论怎么样,永远都保持四轮驱动模式,这种传动系统都是不需要驾驶人选择操作的。行驶的时将发动机输出扭矩按50∶50 设定在前量即火速李参后轮上,使前后排车轮保持等量的扭矩,遇到特别路面的时候就可以自动练活烈才移裂殖往季请简将不同的扭距分配到各个轮子上面。全时驱动系统具有良好的驾驶或弱浓操控性和行驶循迹性,来自不过缺点也是很明显的,那就是比较废油,经济性不够好,而且车辆没有任何装置来控制轮胎转速的差异,一旦也房巴利星皮土一个轮胎离开地面就有可能让你无法前进。
360百科 分时驱动就是由驾驶员根据路面情况,选择四驱或者两驱,这也是一般越野车或四驱SUV 最常见的驱动模式。分时驱动最大的特点就是人工操纪银明可几讨绍并束断作,由驾驶员根据路面情况通过接通或断开分动器来裂变化两轮驱动或四轮驱动模式,最大的优点就是可以根据实际情况来选取驱动模族介固市找补垂重越倒式,比较经济。就拿普通的越野车而言,一般都有三种驱动模式可以选择:在公路上行驶使用2H 高速两轮驱动档,当遇到雨雪路况时选择4H 高速驱动增强车辆的附着力和操控性务发掌氧雨约认自线直,而面对恶劣路况的挑战时又可采用4L 低速四轮驱酒措儿诗临动,使动力作用在全部四个车轮上,从而降低了对每个轮胎附着力的要急距的求,减小了转弯时车轮空转的几率,发动机制动能力也得以增简妒需常京理破保强,极大地提高了车辆在崎岖或光滑路面行驶时在油门突然关闭的情况下的可控性。
优点是可根据实际情况来选取驱动模式,比较经济;缺点消范是其机械结构比较复杂,驾驶员要具有一定的经验才能掌握好切换时机。
散天毛适时驱动介乎全时驱动和分时驱动之间,驱动模式由电脑安排,操纵非常简单。采用这种驱动系统的车辆时根据电脑来控制并且选择适合当下情况的驱动模式。在正常的路面上车辆一般会采用后投员袁输开措志请轮驱动的方式,而一旦遇到路面不良或驱动轮打滑的情况,电脑就会自动检测子并立即将发动机输出扭矩分配给前排的两个车轮,自然切换到四轮驱动状态,从而免除了驾驶人的判断和手动操作,应用更加简单。不过以目前的效果来看,电脑比起人脑速度还是慢了很多,也就是说住往不能及时进行驱动模式的切换,反应较慢。比如北京现代生产的途胜就是采用适时四驱设计。
轿车AWD系统实际上是驱动力目剧女绿节声体材分配控制方式的四轮叶歌镇况式六驱动,它利用电脑和各种不断改进的传感器,不断判断轮胎对地 面的动态附着力和司机的驾驶意图,积极控制汽车差速器的差动状态,平衡各轮的驱动力,优化汽车的各项性能。
典型的轿车AWD系统主要由前后轮驱动装置、传感器、电控单元、分动器和液压装置等组成。控制系统的控制原理,在前后轮之问布置一个湿式多片离合器,在汽车行驶过程中,使用电脑控制液压系统的油压,适应汽车的行 驶状态将驱动扭矩分配到前后车轮上去。
汽车在行驶时,电脑利用下述3种传感器不断检测汽车的行驶状态,即4个车轮的转速传感器、汽车的前后左右加速度传感器、发动机转速传感器。此外,利用转向盘转向角传感器、油门踏板开度传感器不断地判断司机的驾驶意图,按预先给定的程序进行综合控制。在AWD系统中,向前后车轮的动力分配影响到汽车的行驶性能。如当汽车向前后轮驱动力的分配比为0:100时,具有较高的转向性能和极限行驶性能,当驱动力分配比为50:50时,稳定性得到提高,但转向性能和 极限行驶性能会下降。在转向性能、稳定性和极限行驶性能之间要获得良好平衡,必须确定最优的前后驱动力分配系数,理想的分配系数按照不同的路面有所不同,在允许强力加速的铺装路面上考虑到载荷转移,以向后轮分配较大驱动力为宜。但是,在打滑的路面,当向后轮分配较大驱动力时,就会引起过度转向。有资料认为,理想的前后驱动力分配比在3O :70~50:50。目前,本田新一代Legend轿车的SH-AWD能使前后驱动力分配在70:30-30:70内连续变化。
传感器的功用是检测汽车前进过程中的有关运动物理量,并转换成电信号,输入到ECU(电控单元)中,供ECU分析计算。
⑴车轮速度传感器 将4个车轮的速度检测出来,以脉冲信号的形式输出,送入AWD系统ECU,同时也将电信号输入到其它电控系统ECU。
⑵加速度传感器 检测前后左右4个车轮的加速度。确定汽车的加减速状态。
⑶转角传感器 转角传感器安装在转向轮靠近车轮的一侧,用来检测转向轮的瞬时偏转角,可与电控四轮转向系统共用转角传感器。
⑷压力传感器 压力传感器用来检测湿式多片离合器内液压油的压力。
分动器的功能是执行前后轮扭矩分配功能,在分动器中间布置一个湿式多片离合器,该离合器右端通过传动轴驱动后轮,左端通过链传动驱动前轮。
ECU是AWD系统的核心,其功用是根据制定的控制方案,按照编制的程序对各种传感器输入信号进行分析、计算、处理,输出一定的控制信号指令,驱动电磁阀动作。AWD系统ECU主要由输入信号调理电路、微处理器、输出信号处理电路、电源电路等硬件部分以及控制系统和控制程序、软件平台等软件部分组成。为保证控制系统可靠地工作,电控单元还必须采取有效的抗干扰措施和故障自诊断处理措施。
轿车采用电控AWD系统与传统两轮驱动系统相比有如下特点:
①由于现代轿车车速越来越高,特别在高速公路上行驶时由于风阻加大。为最大限度地传递驱动力,采用AWD系统可充分利用车重来提高驱动力。提高汽车在各种路面上行驶的动力性。
②传统前轮驱动轿车,在加速转弯时会出现转向不足现象,传统后轮驱动轿车。在加速转弯时会出现转向过度的倾向。而装有AWD系统的轿车可根据汽车行驶状态分配前后轮驱动力。极大地改善汽车的转向性能。
③轿车AWD系统和全轮驱动专用的制动防抱死系统(ABS)可使轿车获得最大制动力,最大限度地利用路面和轮胎之间的摩擦力。提高汽车的制动性能。
④在越野和泥泞路面及雨天和雪天道路易滑的情况下,AWD系统可防止车辆打滑,提高汽车的通过性。
轿车AWD系统希望不断地提高轿车的驱动性和操纵稳定性。把轮胎对地面的附着力充分发挥出来。从而平衡四轮的驱动力。提高整车牵引力。
随着电子控制技术的进步。各种传感器的不断改进,机电一体化的不断发展,这种理想的驱动力控制系统一定会获得广泛的应用。
目前,轿车AWD系统发展所面临的问题也是未来研究解决的重点问题。主要集中在以下几个方面:
⑴硬件系统的匹配,组成轿车全轮驱动系统(AW1)的结构有多种类型。怎样的组合和匹配是最佳的将是研究人员需要解决的一个问题。
⑵针对AWD系统。进一步开发、设计高性能、高精度、高灵敏度的传感器,以便正确检测汽车的运动信号。同时,可利用CAN总线和其它系统如AMT(自动变速器)、ABS(制动防抱死系统)等进行信息共用。
⑶最优控制策略的确定及将先进的控制理论与控制方法应用于轿车AWD系统的研究中,是研究人员需要解决的重点问题。
⑷进一步简化系统。减小系统结构的体积,控制生产成本。由于新一代各种动态稳定系统的研发和应用,未来的(AW1)系统将和其它电控系统整合在一起,形成集各种功能于一身的综合电控系统。这也是AWD系统研究的长远目标。
ESC、TCS系统通过控制发动机动力输出和制动系统来保证平稳驾驶,以损失动力作为安全保证以防止超越物理极限;AWD控制并调整每个车轮的扭矩输出,在不干涉发动机动力输出的情况下提高了物理极限,保证你全天候的驾驶乐趣。
车辆的驱动型式有FWD(Front-Wheel Drive)、RWD(Rear-Wheel Drive)、4WD(Four-Wheel Drive)和AWD(All-Wheel Drive)。我们先来看看这几种驱动型式。
前轮驱动(FWD):今天占轿车产品的70%的经济型及中级轿车都采用了前轮驱动。就像名字所暗示的,只有前轮传递动力。安装在前部的发动机将动力直接传输到前轮,提高了牵引效率,60%~70%的重量集中在轿车前部,提供了更好的冰雪稳定性,但前轮要承受75%的制动,而且在急加速时车身重心后移,就会造成加速延迟,在操控上也存在着转向过度和后轮打滑现象。
后轮驱动(RWD):豪华轿车通常采用后驱,重量分配接近于50∶50,提供了更平稳的驾驶。RWD与FWD驱动情况正相反,操控性能有所提高。当加速时车身重心向后转移,这正是你所希望的,因为后轮主管牵引力,前轮主管汽车方向。你还可以在弯道加速。这并不是说RWD在结构上就好,它也存在缺陷,如从前到后的传动轴(使车内地板从前到后隆起),还有一个很大的差速器在后部,增加了重量和成本,它同样不适应全天候驾驶。
以上两种车型都是只使用了两个车轮传递动力,为什么不同时使用另两个车轮?四轮驱动就是使用了4个车轮传递动力,它又分为4WD和AWD两种形式。4WD是为了增加牵引力,在不顺利的道路条件下或是追求极限性能驾驶,是专为越野设计的。而AWD主要是为了减少轮胎的滑动和提供更好的操控性能。AWD通常不需要司机来操作接合系统,没有低速范围,按照需求自动分配前后轮扭矩。AWD通常是一种公路驾驶系统,提高公路驾驶性和全天候性,而不是越野性。
AWD可以全时段实现最佳操控。相对于RWD和FWD,AWD对每个驱动轮分配了更少的牵引力,所以会更少发生牵引力大于轮胎和地面的摩擦力的情况,也就是说,驱动轮更少打滑。
显然四轮驱动会带来更高水平的牵引和操控,因为牵引力是被4个车轮而不是2个车轮分享。它能够跨越更高的弯道极限,特别是在粗糙、湿滑路面,所以从1980年奥迪使用AWD开始就主要用于WRC赛车。
全时AWD轿车会产生中性的转向倾向,这要得益于4个车轮共享牵引力。事实上,还与重量分布相关,而通常全时AWD轿车前后的重量分布是50∶50,所以很难出现转向过度。
AWD轿车有些是全时四驱,而有些平时是前轮或后轮驱动,只有在车轮打滑时才变为四驱。今天竞争的压力已使更多的汽车厂商制造了不同级别的AWD轿车。那么AWD是最好的驱动方式吗?并不准确,因为它增加了重量和复杂性及增加了成本,AWD会比2WD多消耗燃油,一般AWD系统会比2WD重50~100kg,即使是一般品牌售价也要增加2000美元.
主变速器通过一个辅助变速器将动力传送到前轮和后轮. 辅助变速器通常有三档选择; 空档,四轮驱动高档,四轮驱动低档。空档时,四轮驱动就变成了两轮驱动。四轮驱 动高档适合于恶劣的路面驾驶,例如,雨雪天和多沙石路面。四轮驱动低档则适合高难度的越野驾驶。
全轮驱动是四轮驱动的一种. 它自动将发动 机提供的 扭矩分送到前轮和后轮,不需要手动去调整,也没有低档选择。全轮驱动 减低了车轮打滑的程度,改善了驾驶者的控车能力。全轮驱动通常是一种 正常路面驾驶系统,并不设计用于越野驾驶。
 关注微信
关注微信