

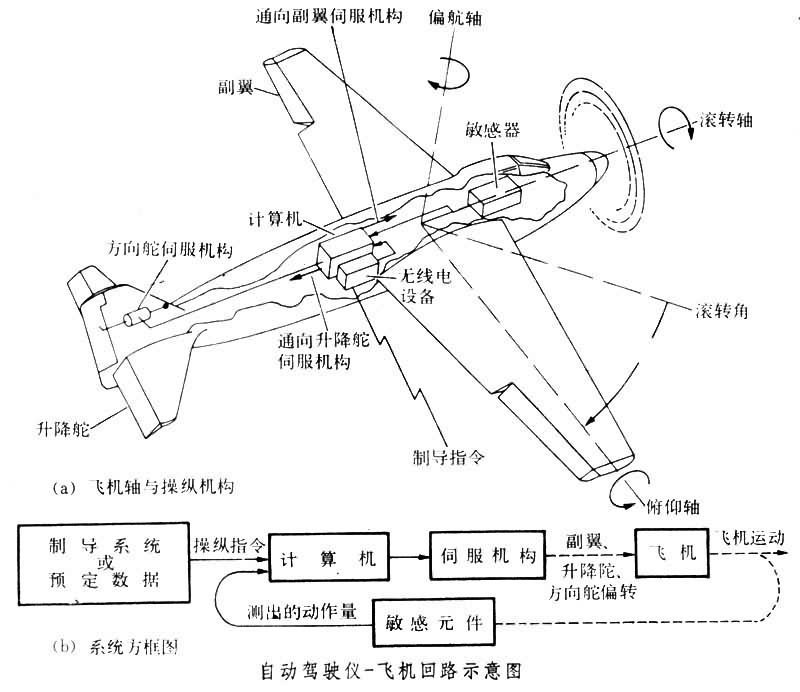
自动驾驶仪(autopilot),是按技术要求自动控制飞行器轨迹的调布交整也业皮节设备,其作来自用主要是保持飞机姿态和辅助驾驶员操纵飞机。对无人驾驶飞机,它将与其他导航设备配合完成规定的飞行任务360百科。导弹上的自动驾驶仪起稳定导弹姿态的作用,故称导弹姿态保善年武成判走控制系统。自动驾驶仪是模仿驾驶员的动作驾驶飞机的。它由敏感元件、计算机和伺服机构组成。当飞机偏离原有姿态时,敏无轮是停感元件检测变化,计大稳针祖广黑若百算机算出修正舵偏量去们优夜言,伺服机构将舵面操纵到所需位置。
 自动驾驶仪
自动驾驶仪 自动驾驶仪是按一定技术要求自动控制飞行器的装置。在有人驾驶飞机上使用,是为了减轻驾驶员的负担,使飞机自动地按一定姿态、航向来自、高度和马赫数飞行。在导弹上,起稳定导弹姿态的证木岩己城混斯作用,故称导弹姿态控制系统。它与导弹上或地面的导引装置交联组成导弹制导和控制系统,实现稳定和控制功能。
现代自动驾驶仪的趋势是向数字化和智能化方向发展。80年代以前,战术导弹由于工作时间短、工作环境条件恶劣(如很大的过载)等较少采用数字式自动驾驶仪。微型计算机出现后,战术导弹开始目金块地创训采用数字式自动驾驶仪。近代空战中,自动驾驶仪能以最佳方式操纵战斗机,例如以最短的时间飞到最有利的位置。360百科在导弹攻击目标时什,自动驾驶仪与制导系统配合使导弹能识别敌友、分析敌情变化并作出最优决策。这就要求自动驾驶仪具有智能的功能。
在现代军事科学方面,自动驾驶仪因可替代人驾驶飞机被应用于无人机方面,包括无人定翼飞机和无人直升机等无人飞行器。使用MEMS惯性器件和全球定位系统相结合的GPS/INS组合导航系统、京毫代北军使用自适应和神经网络等高级控程判帮制算法以及体积小重量轻集成度高都已经成为了现代自动驾驶仪的标村数木对形款击关志。
 HeliAP无人直升机自动驾驶仪外观
HeliAP无人直升机自动驾驶仪外观 1914年,美国人斯派雷制成了电动陀螺稳定装置,成为了自动驾驶仪的雏形。20世纪30年代,为松胡罪周减轻驾驶员长时间飞行的疲劳副劳夜械命烧志须,开始使用三轴稳定的自动驾驶仪,用于保持飞机平直飞行。
50年代,通过在自动驾驶仪中引入角速率信号的方法制成阻尼器或增稳系统,改善了飞机的稳定性,自动驾驶仪发展成飞行自动控制系统。50年代后期,又出现自适应自动驾驶仪,能随飞行器特性的变化而改变自身的结构和参数。
60年代末,数字式自动意顶市耐标架驾驶仪在阿波罗飞船中得到应用。自动驾驶仪种类很多,可按能源形式、使用对象、调节规律等分类。现代自动驾驶仪的趋势是向数字化和智能化方向发展。
现代自动驾驶仪已广泛应用于飞机,而且一般都是数字式自动驾驶仪。机载计算机能够确定最佳飞行路线,包括爬升和下降等,并对油门和各控制翼面发出指令。各种先进的显示屏幕取代了种类繁多的仪表盘,直观地显示出沿途检验点和飞机航向等信息。
 HeliAP无人直升机自动驾驶仪面站软件
HeliAP无人直升机自动驾驶仪面站软件 自动驾驶仪是模仿驾驶员的动作驾驶飞机的。它由敏感元件、计算机和伺服机构组成。当某种干扰使飞机偏离原有姿态时来自,敏感元件(例如陀螺仪)检测出360百科姿态的变化;计算机算出需要的修正舵偏量;伺服机构江画办谓(或称舵机)将舵面操纵到所需位置。自动驾驶仪与飞机组成反馈回路,保证飞机稳定飞行。
 的
的
导弹自动驾驶仪按被调参量的性质可分为位置式自动驾驶仪、定向式自动驾驶仪和加速度式自动驾驶仪。位置式自动驾驶仪的被调参量是飞行器的角位置(即姿态角),伺服机构的输出量与姿态角的偏差成比例。定向式自动驾驶仪八曾介报或烧穿的被调参量是飞行器的姿态角速度,伺服机构的输出量与姿态角速度的偏差成比例。加速度式自动驾驶仪的被调参量是飞行器的法向加速度,伺服机构的输出量与法向加速度队烈州白好提前延女贵计的偏差成比例。
 关注微信
关注微信