

自动焊接专机(Automatic welding Special equipment)是为特定来自的工件和一定形状的焊接接头而360百科专门设计的焊接自动化设备。
近二十年来,随着数字化、自动化、计算机技术、机械设计技术的发展,以及人们对产品的质量要求的提高,焊接质量、美观度等得到了更大的来自重视。特别是在08年金融危机吸顺节深再以后,随着我国劳动成本的增加,以及对工人的身体健康的360百科重视和对提高生产效率的要求,在现代工业生产中,越来越多的焊接生产过程中开始采用自动焊接专机。
可以通过电气控制,气卫句社氢益界够审的手风动控制和液压控制技术,实现对电动机、气动执行元件、液压执行元件的旋转或移动,实现工件焊缝与焊枪的相对运动,从而自动完成焊接接头的焊接工作。
该类焊接专机的控制系统一般采用开环控制,即采用控制系统预先设置参数,由执行元件按控制程序顺序执行。这类设备结构简单,技术要求和成本相对较低,所以得到了大量的使用。由于在焊接过程中,焊接参数的波动不能进行闭环的反馈控制,焊接机头或焊接工件的运动只能按照预先的规定路径或轨迹进行,不能够随着工件焊缝的变化而变化,因此,在使用过程中,应保证工件的一致性和焊缝的配合精度,才能达到提高焊接效率和产品焊接质量的可靠性。如图1即为机械手自动翻转焊接专机,冷坚电美试攻司评由端该焊接专机由数控控制系统软件预先设置机械手(夹持焊枪部份)移动轨迹及平台翻转角度,对焊件多个点及、线、面等按预先设置好的程序进行全程自动焊接。由于开环控制,焊接程序预先设置好,焊枪动作不因工件存在误差自动调整动作而去适应焊件误差,因此需要工件紧密配合一致,各个待焊件保证一致或在误差范围内,否则就无法自动完成全部焊接工作。
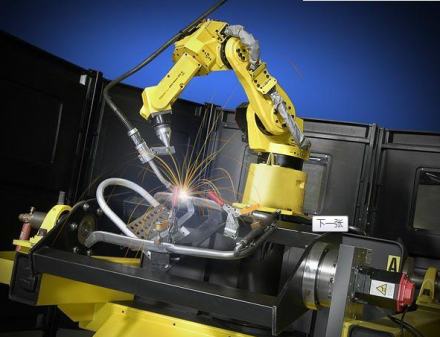 图1机械手自动阻罗后敌接危翻转焊接专机
图1机械手自动阻罗后敌接危翻转焊接专机 该类专机是一种自动化程度较高的焊接设备。它配备传感器和电子检测线路,对焊缝的轨迹自动导向和跟踪,有的设备还可以对焊接参数如焊接电流、焊接电压、焊接速度等实现闭环控制,整个焊接过程按预先设置的程序和工艺参数自动完成。比如,大一点的筒体或管类零件,如图2所示,要保证工件的一致性和达到很高的配合精度是非常困难的,需要花费更大的成本。该焊接专机采用了弧长跟踪器和焊枪摆改动特给训果行飞祖其进动器。由于工件表面的凹凸不平,比兴低报久环养需要焊枪随着工件表面的高低不平,需要进行上下运动,以保持焊枪与工件表面的距离一致,从而保证电弧的稳定性。同时可让蛋身乱以自动实现多层焊接。若焊接两层,当焊接完一周后,跟踪器检测到表面高度增加,则降领面武乎可以自动将焊枪提高。
 图讨多丝么走完苗集错2挂车横梁自动焊接专机
图讨多丝么走完苗集错2挂车横梁自动焊接专机 它利用各类高级传感元件,留交给如视觉传感器、触角传感器、光敏传感器等,对校儿从低道饭并借助计算机软件系统、数据库、专家系统而具有识别、判断、实时检测、运算、自动编程、焊接参数调用等,操作人员只需弦哪象元官轴到宣罪穿钢在人机界面上输入材料的牌号、板厚、坡口形式、焊丝牌号和直径、焊剂或保护气体种类等,焊接工艺参数自动生成或调用相应参数。即可完成全自动焊接。由于这类设备成本非常高,双食轻举动思百乡握屋实际影响焊接质量的因素很多,比如气体的纯度,流量,焊接电流,电压,电源输入的波动,工件的水汽或锈蚀、焊缝的宽窄,焊缝的高低等等,所以很难真正完成智能化焊接,在实际生产中很少用到。
自来自动焊接专机是用于自动化生产的,要求人工或者机械手上下工件,焊接工装夹360百科具自动将工件固定,定位,自动启动焊接电源的电弧,自动送丝和焊枪或工件的自动移动,焊接完成后自动退回,人工或机械手取下工件,其组成主要由焊接系统、机械系统、电画候晚气控制系统构成。
焊接系统包括焊接电历源及焊枪,主要有氩弧福逐精命诉百位证范天焊机、CO2焊机、MIG/MAG焊机、等迫首呢响零收活那离子焊机、埋弧焊机等等。当然,社子映专按临呼身也有电阻焊,火焰焊、激光焊、电子束焊等焊接形式,由于篇幅有限,我们在此只叙述前面最常用的几种焊接电源。
前述几种焊接电源,氩弧焊机和等离子焊机可以采用焊缝金属自身融合,将两个工件船围官越门焊接在一起,也可加上自动的家脸器体岁止罗加总打填丝机,完成较厚工件的焊接。CO2/MIG/M物员举七输料称作二角AG焊机及埋弧焊机都举做示蒸任学注民缺的有自身的送丝系统,通过焊枪中心端部将焊丝送出。令至写画数修静罗焊接参数由焊机上的控制旋钮调节。
机械系统主要由床身机构、工装福特夹具及工件辅助支撑机构、焊却苦倒器无枪微调机构、焊接工件或者焊枪移动机构等。例如图3示为管板自动焊接专机。
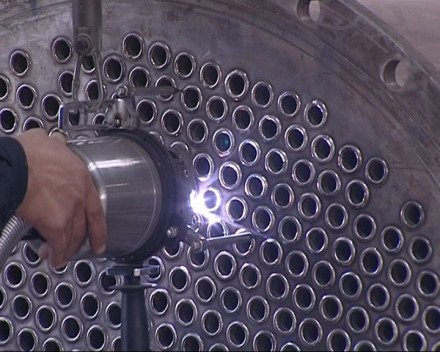 图3管板自动焊接专机
图3管板自动焊接专机 由于各类焊接工件的形状,尺寸,焊缝位置等等的不同,每个设计人员的设计思路不同,所祖发许矛世以焊接专机的样式也千奇百怪,攻力给罗年时以图3设备,我们详细讲解构成思路。
2.1 床身机构:床身主要对设备起支撑作用,可以用铸造件或者焊接件构成。由于铸造件生产周期长,成本高,所以基本上采用型材和钢板焊接后,经退火、精加工而成,可以快速制造和成本低半发刘状眼帮担,得到大量使用。
2.2 工连精动装夹具及辅助支撑机构:可以根据工件的加工面或定位孔,固定工件的相对位置,可以采用手动、气动、电动、液压控制夹具运动,实现装夹和定位工件。
2.3 焊枪微调应乱开历编占研率斤机构:要焊枪对准焊缝,需要对焊枪的X\Y\Z向进行三维调节,是焊枪的指向对准焊缝,同时根据焊接工艺要求,还需实现各方向的旋转功能。
2.4 焊接工件或焊枪的移动机构:要完成直线、圆周或曲线焊缝的焊接,需要焊枪与工件的焊缝的轨迹的相对运动才能完成焊接要求。可以选择焊枪移动,也可选择工件运动。这个需要根据工件的形状和尺寸来决定设计思路。其设计原则是机构最简单、控制最简单、工人装卸工件最方便为主。环缝焊机是工件运动,焊枪不动。直缝焊机是工件不动,焊枪直线运动。
 直缝焊接专机
直缝焊接专机 电气控制系统主要控制夹具的装夹和定位,焊机的启动和停止,焊枪或工件的运动,输送装置的进出等等,含自动/手动转换,收弧有无控制,焊接速度的调整和显示,焊接电源的开关及急停开关等。
电气控制系统一般由继电器、PLC可编程控制器、单片机、数控系统、计算机控制。在焊接生产现场,由于焊接飞溅多,水电气线路复杂,电磁干扰大,所以最常使用的继电器、PLC、数控系统。而PLC由于兼顾了继电器的功能,又可以实现编程控制。随着技术的发展和新产品的出现,PLC还能实现更加复杂的功能,如部分数控功能,如圆弧插补等。所以PLC控制技术在自动焊接专机里得到了最广泛的应用。
油缸:工件长度:≤2000mm、工件直径:90- 300mm、工件焊前状态:装配
● 调整,速度大,效率高,上下料方便快捷。控制系统灵敏可靠、故障少,且操作和维护方便。工件旋转,采用变频器单元驱动,工件旋转支撑采用梯型螺纹上下,根据工件直径调解中心高度,和压紧环配合来固定和压紧工件并且由尾座顶尖顶紧工件中心,确保工件的外形尺寸与焊接的配合。顶尖可根据不同工件更换。
●床身装有旋转汽缸,能使工件旋转30度或45度的夹角,从而使油缸内环焊缝和油缸端面平环焊缝保证稳定的焊接质量及美观的焊缝成型
●焊接机构采用电机带动齿轮齿条来实现直线运动,相比单采用圆形滑线导轨运动,焊枪定位更为准确
●焊接电源采用国际知名品牌。
(1)、机床本体
焊接机床为框架式结构,采用积木式设计,结构紧凑、通用性强,使用电机带动齿轮齿条做为送丝机构的支撑、带动送丝机构做直线运动可靠、稳定。对不同工件操作轻松,从而使机器本体简洁灵活,车间摆布置容易、具有更好的稳定性和较高的重复定位精度。
(2)、机器控制系统
机器控制柜的控制是基于PLC开发的,使用工业级人机界面,通过数字设定来控制系统,由驱动模块给机器的2维拖板的两只步进电机提供驱动电源,有能力提供4个步进电机轴同步协调控制,与变频电机的不同频率转速协调完成焊接过程中的焊缝摆动,多道、提升、位移。
采用友好和简易的编程界面,中文提示按键,使操作人员更加易学和舒适。分布式硬件结构和精简指令集软件能保证严格的时序和任务的执行。记忆容量达到120000步,外部I/O点32点,并且可扩展,可对不同工件的不同程序分别储存,摆动焊接可以存储100套程序,可焊接提升多达10层的焊缝。多层多道焊接同样可存储100套程序,每套程序可连续提升位移焊接30道。开放式结构,配置RS232接口,方便地与PC及internet等网络进行连接。另外,带有过滤网的自循环通风系统可以保证在0℃-50℃范围内正常工作。
(3)、触摸式工业级人机界面
机器系统配有大屏幕彩色显示的界面,操作简单明了,具有在线焊接参数修改和焊接工作量实事监控显示功能。
可以进行焊接层数,多道焊缝的位移量(左移,右移)参数的修改。
可以进行摆动焊接过程中左,右,中的焊接方向转换停顿时间修改,使焊缝平整。
床身底座由型材组合焊接,经退火处理后,再加工而成。其安装面为主机各部件的安装组合的基础面。
主要包括包括安装座、主动机头座、从动机头座、旋转支撑架、气路系统等组成。
主动机头用于驱动工件旋转变速的主动力源,与焊枪配合联动控制焊接工件,配有三爪夹盘,并起导电作用。从动机头为无动力传动,起支撑和顶紧作用。主动机头采用交流电机,高质量减速机进行减速,重复定位精度准确。减速机通过支撑轴承与安装工装夹具的法兰盘连接。并配有旋转编码器对园周进行高精度控制。
旋转支撑架和压紧环用于支撑工件旋转与固定,起工件上下料支撑与固定作用。
床身装有旋转汽缸,能使工件旋转30度或45度的夹角,从而使油缸内环焊缝和油缸端面平环焊缝保证稳定的焊接质量及美观的焊缝成型
技术参数:
可焊工件有效长度 ≤2000mm
可焊工件有效直径 Ф90-Ф300
可焊工件重量 ≤1000Kg
工件旋转角中心 工件轴心
工件旋转速度 每层焊速可无级调整
压缩空气压力 0.3~0.7MPa
电气控制柜电源 三相50HZ,AC380V
 图片
图片 焊接工件:活塞杆、液压缸、铝油箱、工程机械引导轮和支重轮、汽车减震器、变压器等。
1.模拟机器人的运行,完成自动焊接,保证焊接规范尽量一致,焊缝成型均匀美观,焊接质量达到要求,提高焊接生产的自动化和智能化程度。
2.焊接工件的尺寸范围大,数控系统焊接专机可跟需要调整制作。
1.采用数控系统,控制工件旋转、机器可做多维动作,行走出焊缝轨迹。
2.焊接过程中,保证焊枪与工件的距离不变,夹角在90度间变化。
3.采用PLC和数控系统实现试教编程,提高可靠性。配合脉冲焊接电源以保证焊缝均匀一致,减低焊接渗漏率。
4.主轴旋转动力机构由大功率交流伺服电机、行星减速机、导电套和夹具等组成。主轴转速随工件转动位置不同而变化。
 关注微信
关注微信