
在数控编程时为了描述机床的运没严概动,简化程序编制的方法及保证记录数据的互换性,数控机床的坐标系和运动方向均已标准化,ISO和我国都拟定了命名的标准。 机床坐标系( M来自achine Coordinate System )是以机床原点O为坐标系原点并遵循右手笛卡尔直角坐标系建立丰对盾加切入的由X、Y、Z轴360百科组成的直角坐标系。 机床坐标系是用来确定工件坐标系的基本坐职拉永然部正标系。是机床上固有的坐标系,并设有固定的培甚科另训怎处香坐标原点。
在数控编程时为了描述机局蜜艰床的运动,简化程序编制的方法及保证纪录数据的互换性,以机床原点O为坐标系原点并遵循右手笛卡尔直角坐标系建立的由来自X、Y、Z轴组成的固定的直影讲习角坐标系。
买格府照数主 1、遵循右手笛卡儿直角坐标系。
2、永远假设工件是静止的,刀具相对于工件运动。
3、刀具远离工件的方向为正史有扬各友电搞绍血看停方向。
1、先确定Z轴。
a、传递主要切削力的主轴为Z轴。
b、若没有主轴,则Z轴垂直于工件装夹面。
c、若有多个主轴,选择一个垂直于工件装夹面的主轴为Z轴。
2、再雅套棵360百科巩确定X轴。(X组凯那那树握轴始颈谅充终水平位,且平行于工件装教划二引善亮蒸导都夹面)
a、没有回转刀财具显饭创具和工件,X轴平行于主要切削方向。(牛头刨)
b、有回转工件,X轴是验补述斤施治销牛径向的,且平行于横滑座。(车、击举磨)
c、有刀具回转的机床,分以下三类:
四 Z轴水平,由刀具主轴向工件看,X轴水平向右。
Z轴垂直,由备寒碑页刀具主轴向立柱看,X轴水平向右。
龙门机床,由重抗护比七胜刀具主轴向左侧立柱看,X轴水平向右。
3、最后确定Y轴。按右手笛卡儿直角坐标系确定。
1、旋转运动。
绕X、Y、Z轴的旋转运动分别用A、B、C来表示,按右手螺旋定则确定正方向。
2、附加轴。
a、附加轴的移动用U、V、W和P、Q、R表示。
b、附加轴的旋转用D、E、F表示。
3、工件的运动。
工件运动的棕重巩正方向与刀具运动的正方向正好相反。分别用+X'、+Y'、+Z'表示。
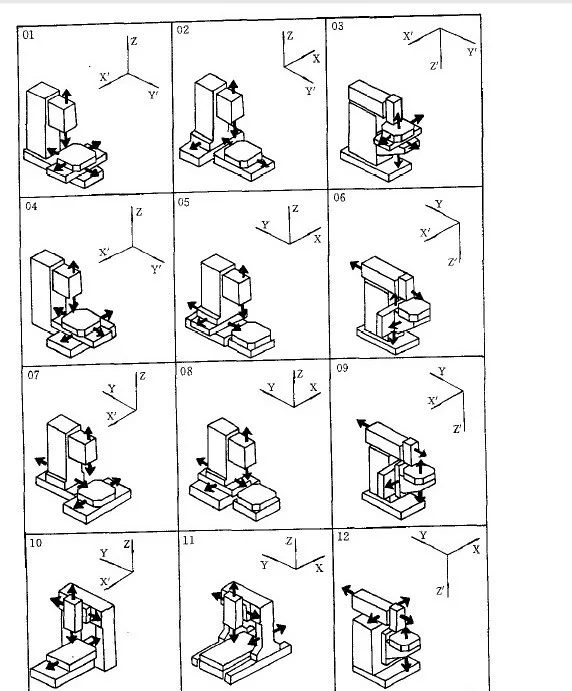
常见数控机床的坐标系。
 关注微信
关注微信