
对于搞微服务的同学来说,服务注册、服务发现的概念应该不会太陌生。
简单来说,当服务A需要依赖服务B时,我们就需要告诉服务A,哪里可以调用到服务B,这就是服务注册发现要解决的问题。
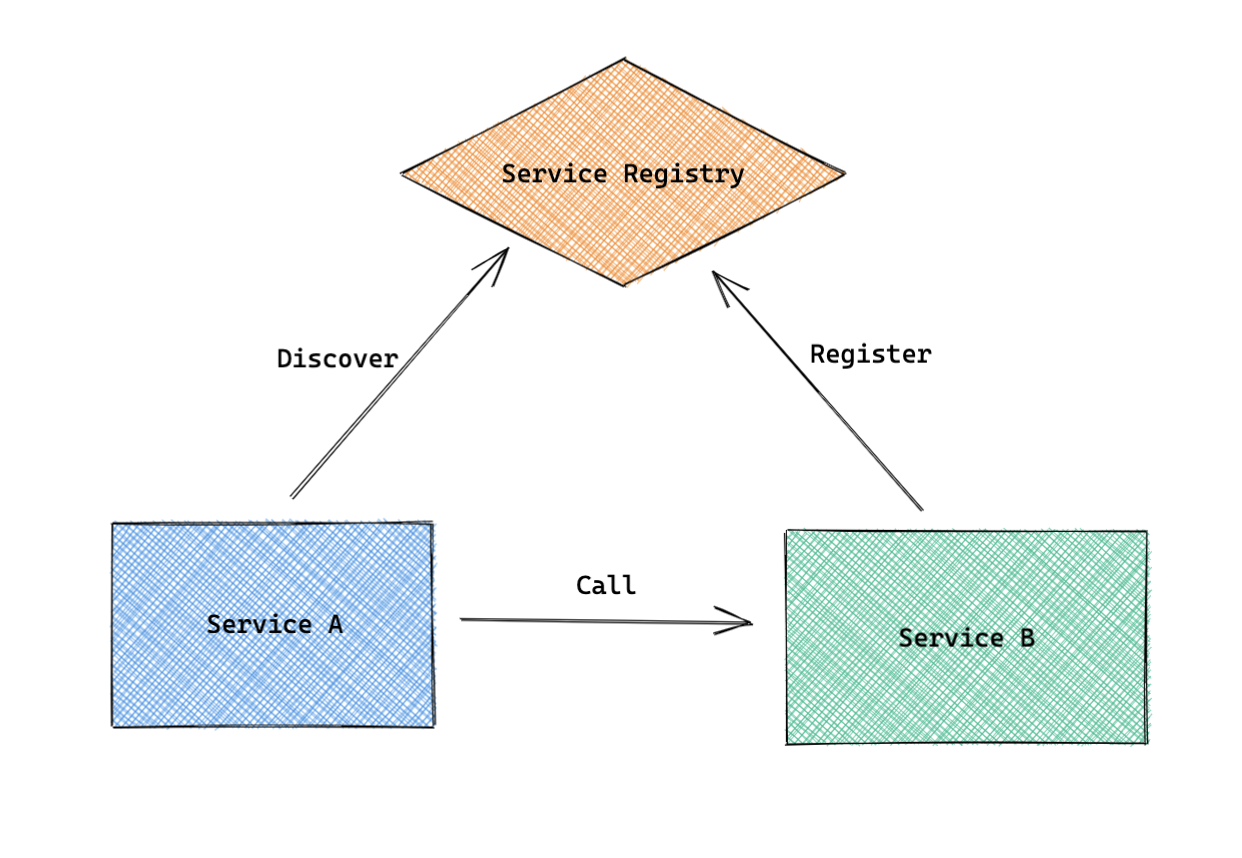
服务注册是针对服务端的,服务启动后需要注册,分为几个部分:
当一个服务节点起来之后,需要把自己注册到 Service Registry 上,便于其它节点来发现自己。注册需要在服务启动完成并可以接受请求时才会去注册自己,并且会设置有效期,防止进程异常退出后依然被访问。
定时续期相当于 keep alive,定期告诉 Service Registry 自己还在,能够继续服务。
当进程退出时,我们应该主动去撤销注册信息,便于调用方及时将请求分发到别的节点。同时,go-zero 通过自适应的负载均衡来保证即使节点退出没有主动注销,也能及时摘除该节点。
服务发现是针对调用端的,一般分为两类问题:
还有一个常见的工程问题是
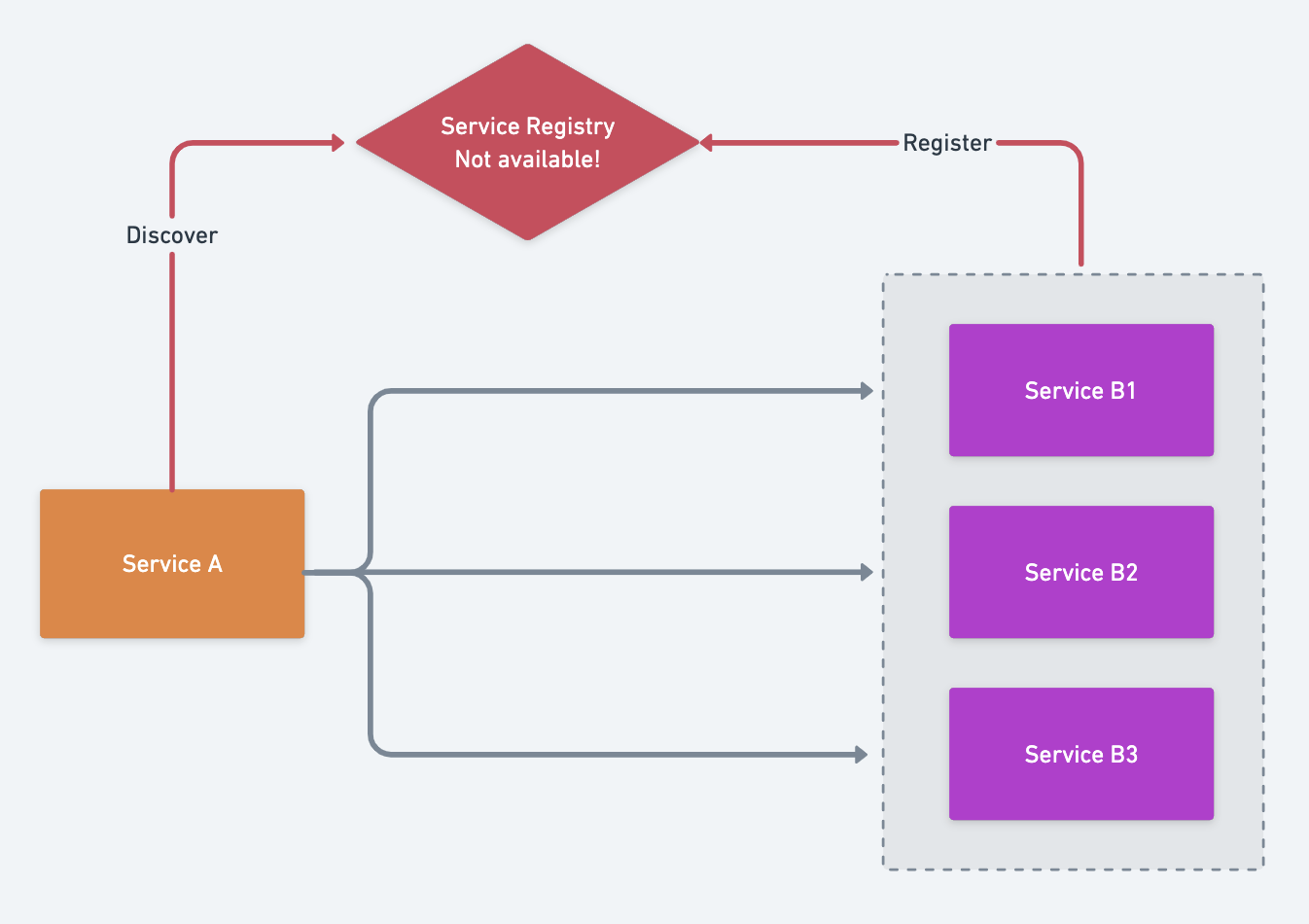
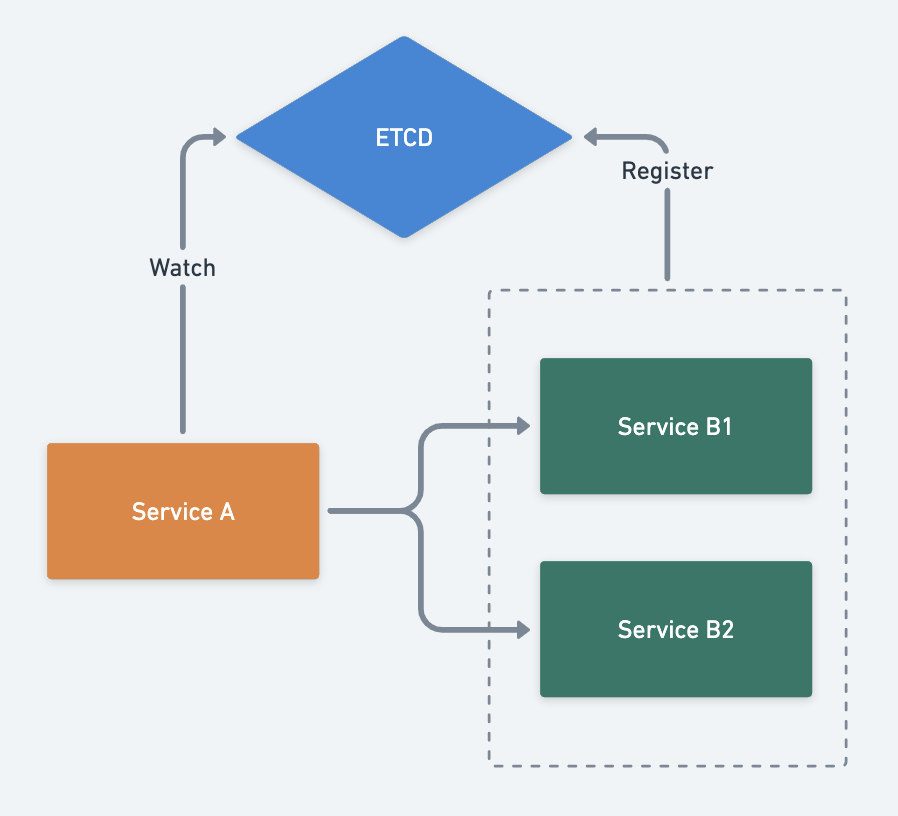
当服务发现服务(比如 etcd, consul, nacos等)出现问题的时候,我们不要去修改已经获取到的 endpoints 列表,从而可以更好的确保 etcd 等宕机后所依赖的服务依然可以正常交互。
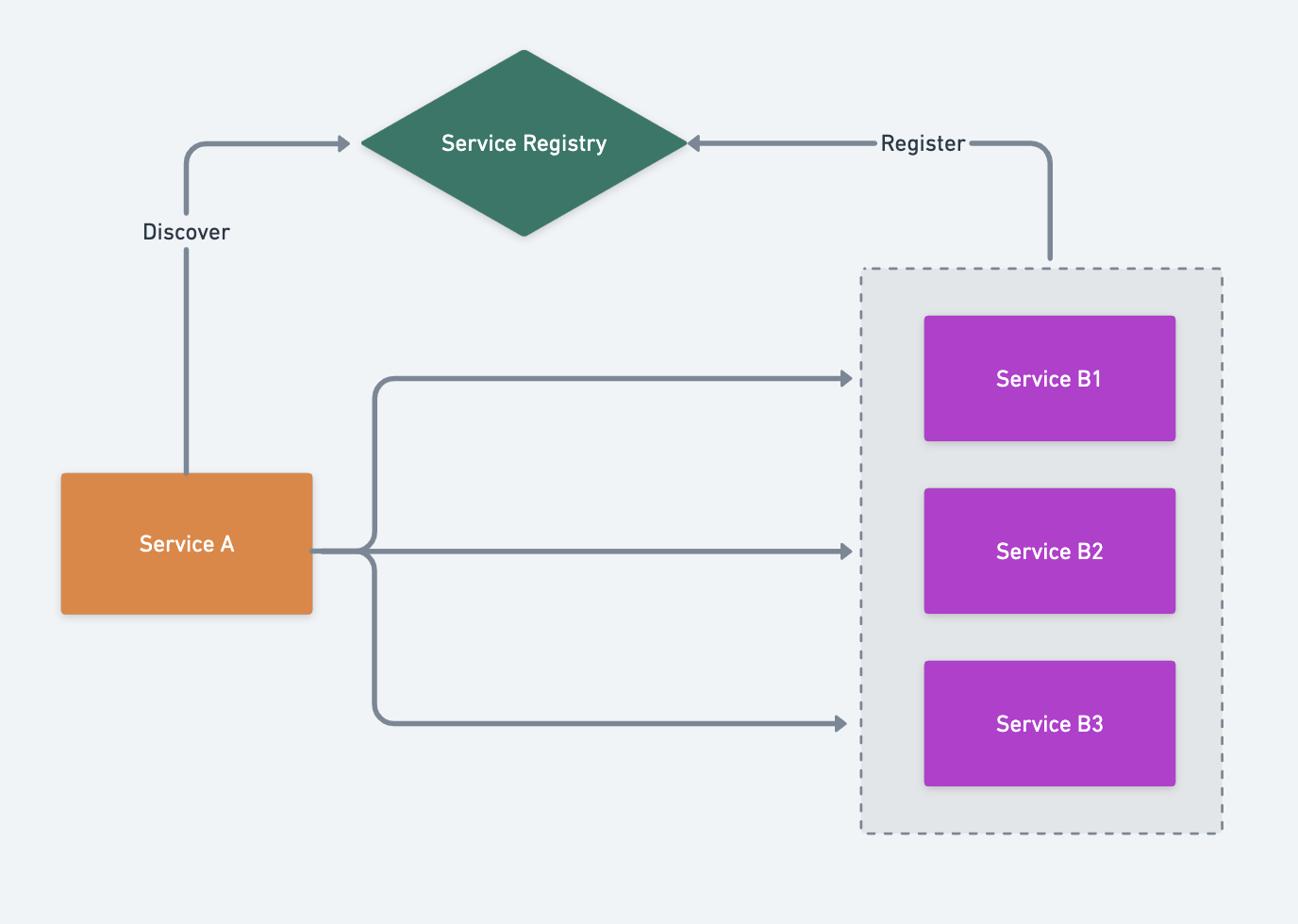
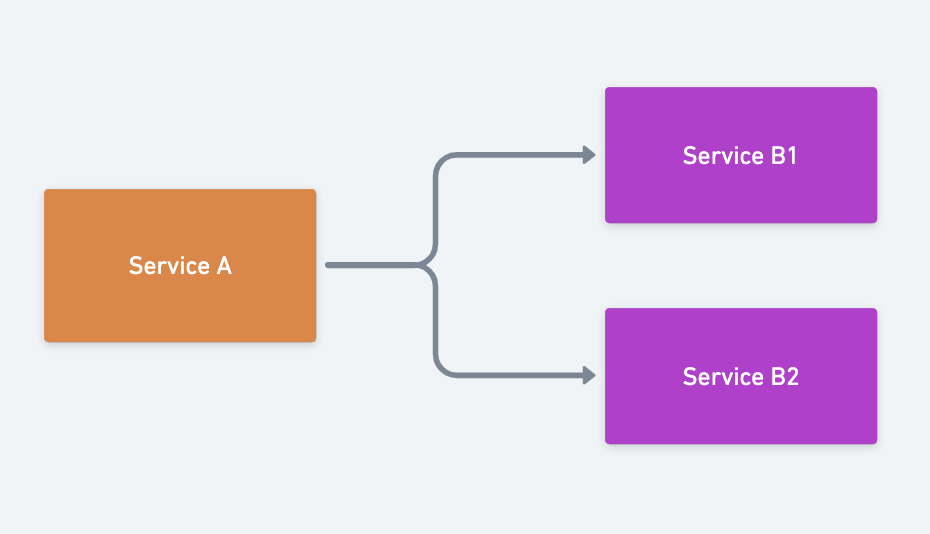
当 Service A 启动时,需要从 Service Registry 获取 Service B 的已有节点列表:Service B1, Service B2, Service B3,然后根据自己的负载均衡算法来选择合适的节点发送请求。
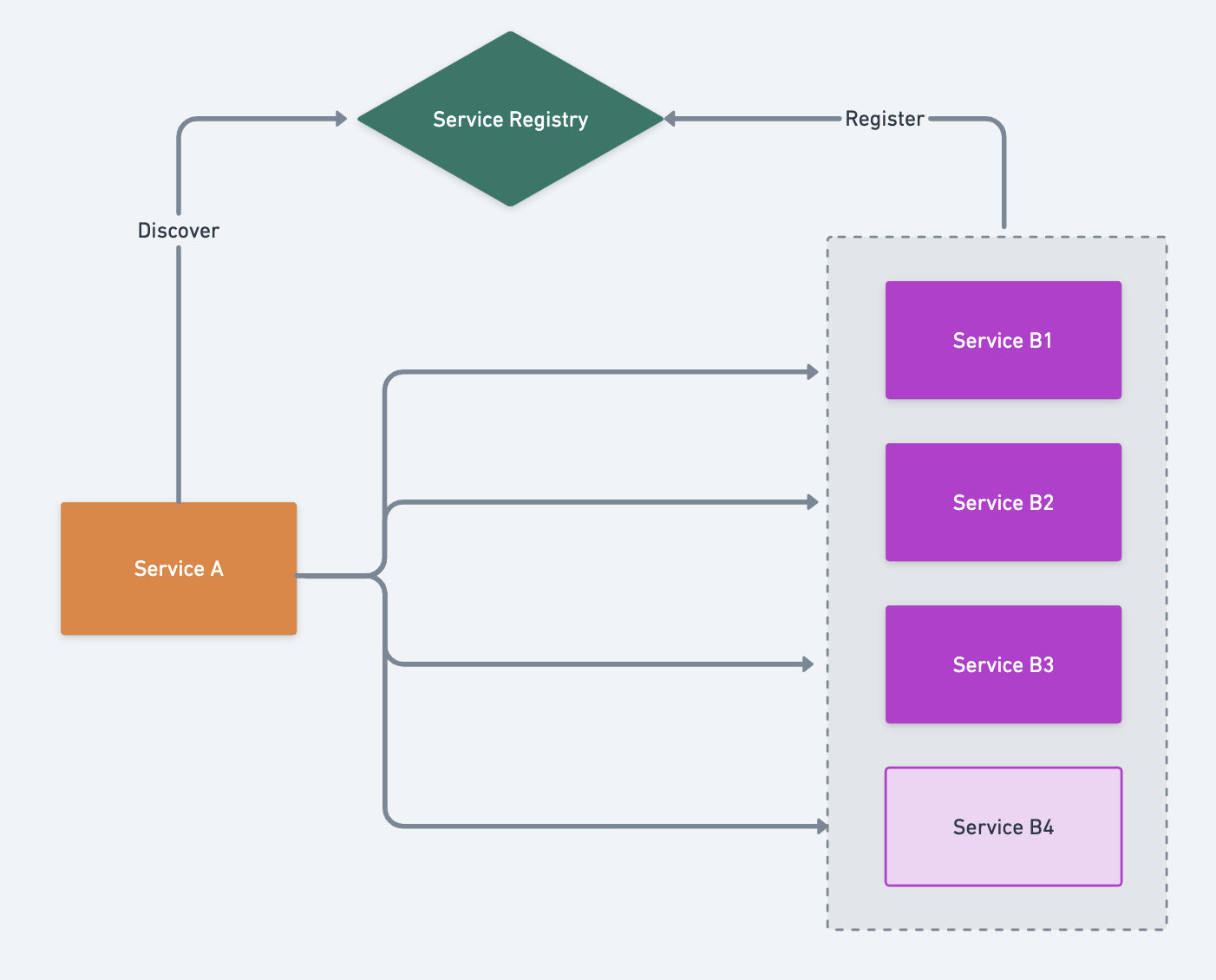
上图已经有了 Service B1, Service B2, Service B3,如果此时又启动了 Service B4,那么我们就需要通知 Service A 有个新增的节点。如图:
对于服务调用方来说,我们都会在内存里缓存一个可用节点列表。不管是使用 etcd,consul 或者 nacos 等,我们都可能面临服务发现集群故障,以 etcd 为例,当遇到 etcd 故障时,我们就需要冻结 Service B 的节点信息而不去变更,此时一定不能去清空节点信息,一旦清空就无法获取了,而此时 Service B 的节点很可能都是正常的,并且 go-zero 会自动隔离和恢复故障节点。
服务注册、服务发现的基本原理大致如此,当然实现起来还是比较复杂的,接下来我们一起看看 go-zero 里支持哪些服务发现的方式。
go-zero 默认支持三种服务发现方式:
直连是最简单的方式,当我们的服务足够简单时,比如单机即可承载我们的业务,我们可以直接只用这种方式。
在 rpc 的配置文件里直接指定 endpoints 即可,比如:
Rpc:
Endpoints:
- 192.168.0.111:3456
- 192.168.0.112:3456
zrpc 调用端就会分配负载到这两个节点上,其中一个节点有问题时 zrpc 会自动摘除,等节点恢复时会再次分配负载。
这个方法的缺点是不能动态增加节点,每次新增节点都需要修改调用方配置并重启。
当我们的服务有一定规模之后,因为一个服务可能会被很多个服务依赖,我们就需要能够动态增减节点,而无需修改很多的调用方配置并重启。
常见的服务发现方案有 etcd, consul, nacos 等。
go-zero内置集成了基于 etcd 的服务发现方案,具体使用方法如下:
Rpc:
Etcd:
Hosts:
- 192.168.0.111:2379
- 192.168.0.112:2379
- 192.168.0.113:2379
Key: user.rpc
如果我们的服务都是部署在 Kubernetes 集群上的话,Kubernetes 本身是通过自带的 etcd 管理集群状态的,所有的服务都会把自己的节点信息注册到 Endpoints 对象,我们可以直接给 deployment 权限去读取集群的 Endpoints 对象即可获得节点信息。
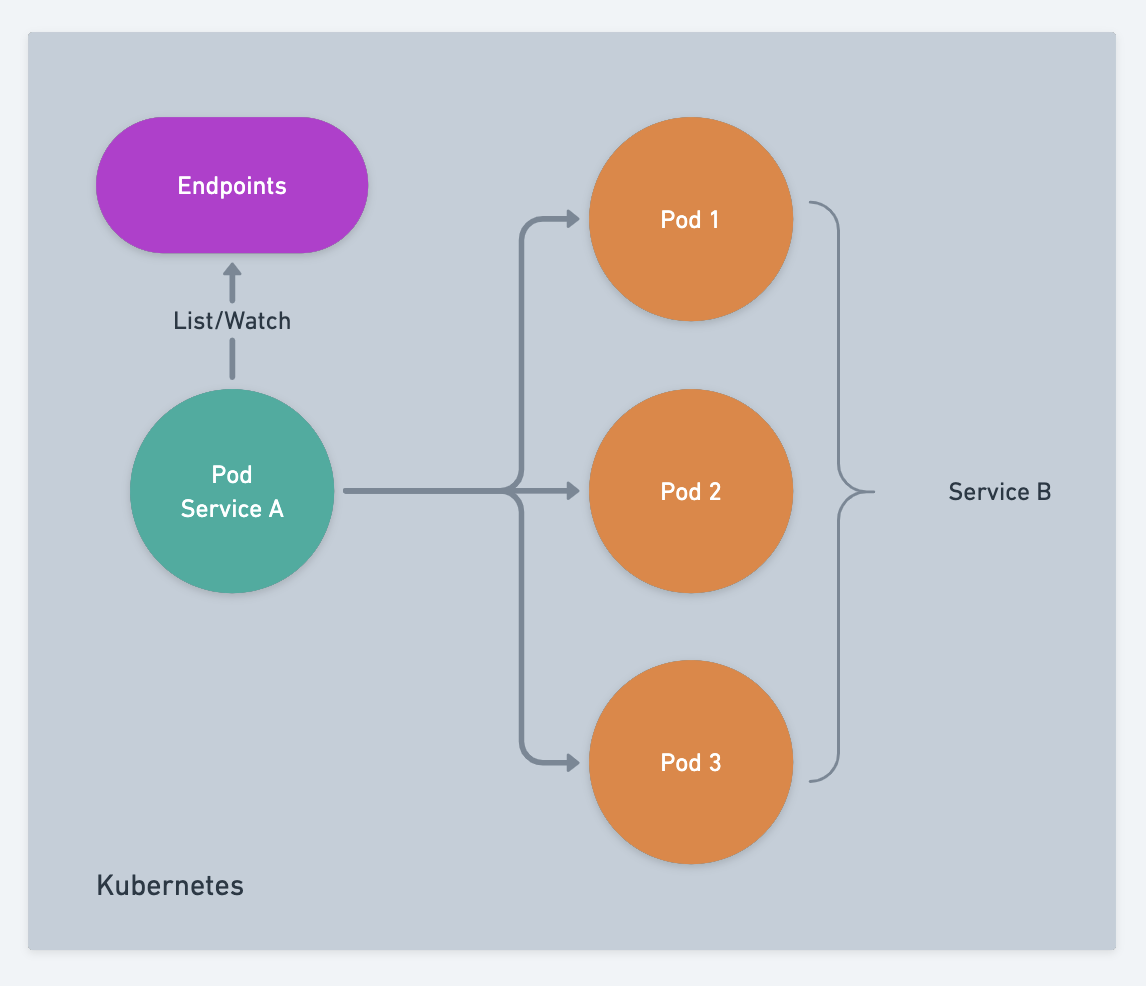
在这个机制工作之前,我们需要配置好当前 namespace 内 pod 对集群 Endpoints 访问权限,这里有三个概念:
具体的 Kubernetes 配置文件可以参考 这里,其中 namespace 按需修改。
注意:当启动时报没有权限获取 Endpoints 时记得检查这些配置有没落实
 关注微信
关注微信