
自己学习记录用,有些乱,
1、IIC,eeprom24c02驱动配置
本实验是基于EEPROM的24C02驱动配置的编程,主要记录一些编程的重点节点的理解:
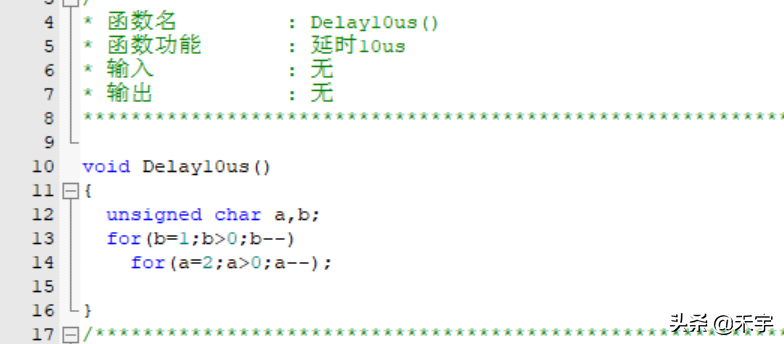
1、IIC驱动配置:精准的时钟配置,计算每一步所需要的指令周期,相加是10us。
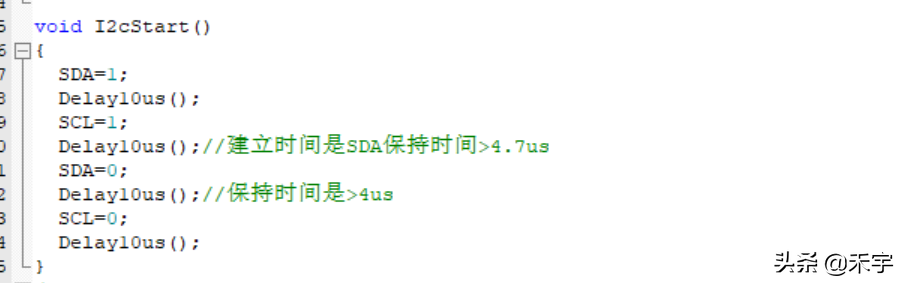
2、IIC的起始信号配置,根据IIC的时序特性配置。
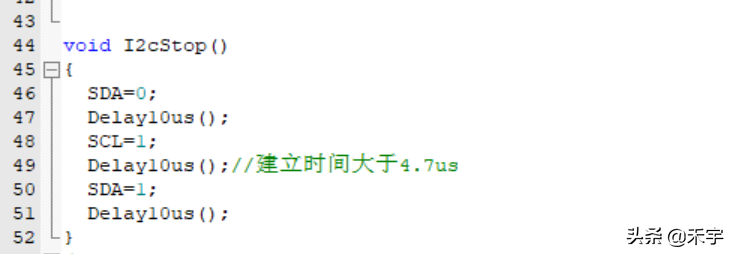
3、IIC终止信号配置,根据IIC的时序特性配置。
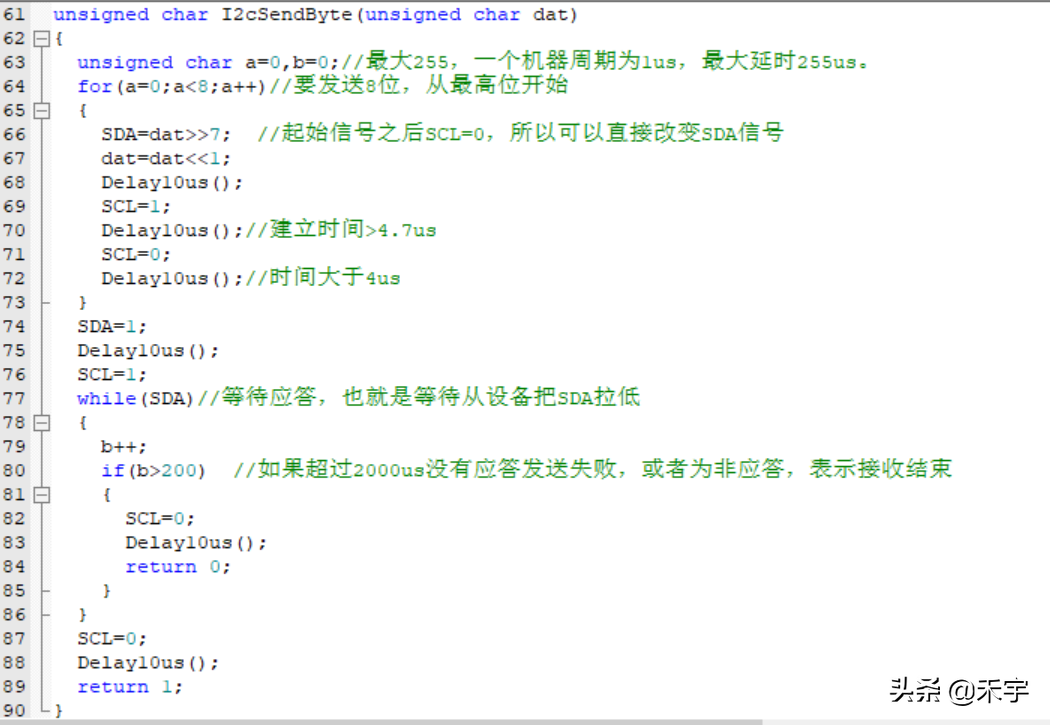
4、I2cSendByte(unsigned char dat): 通过I2C发送一个字节。在SCL时钟信号高电平期间,保持发送信号SDA保持稳定。
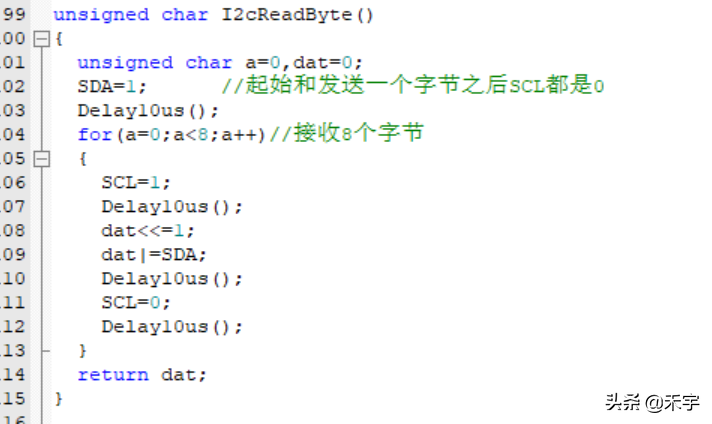
5、I2cReadByte(),函数功能 : 使用I2c读取一个字节
6、void At24c02Write(unsigned char addr,unsigned char dat) 函数功能 :向 24c02的一个地址写入一个数据。
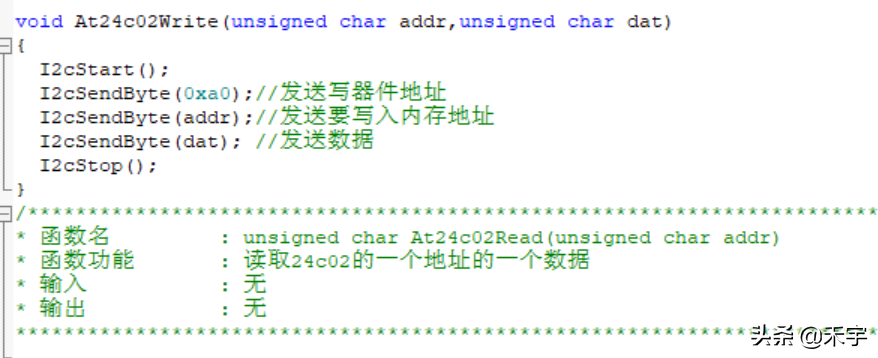
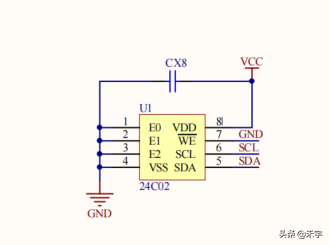
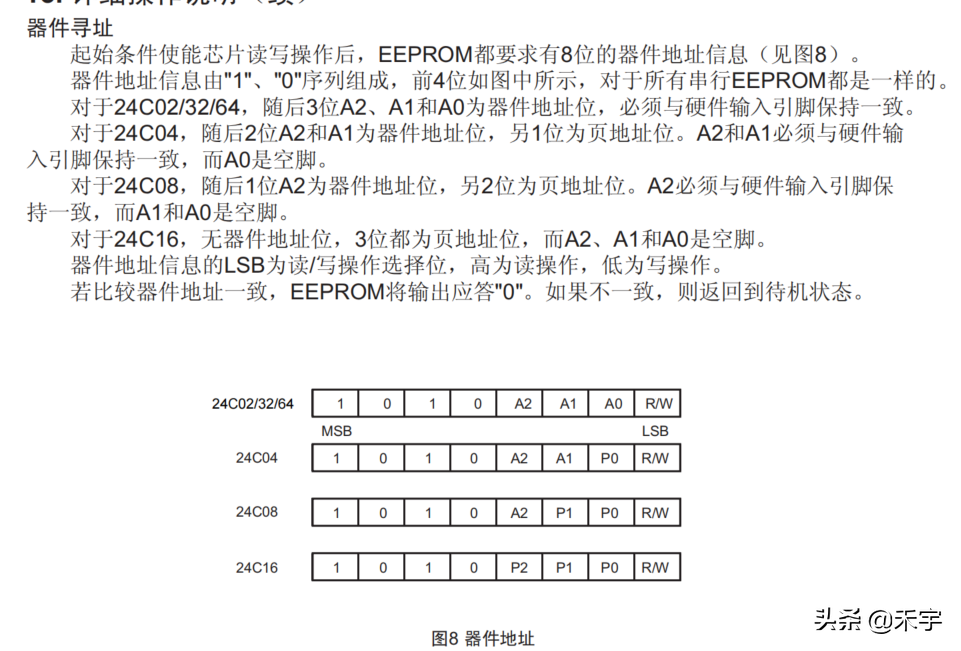
发送写器件地址是根据24C02的电路特性和地址特性获得。24C02是有E0,E1,E2寻址,根据下面两图片可知是8位寻址,因E0、E1、E2引脚接地,而是写所以,R/W位为零。,即发送器件地址位0xa0,同理接收时,接收器件地址为0xa1.
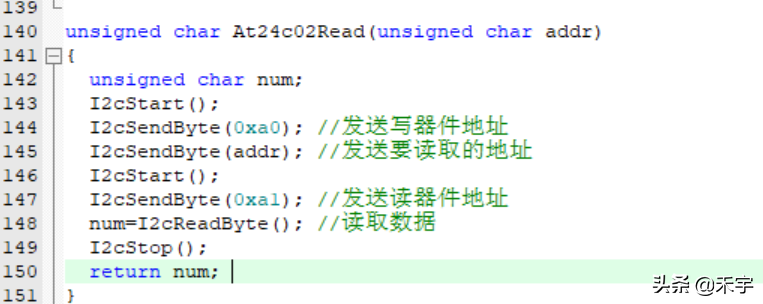
7、unsigned char At24c02Read(unsigned char addr)函数功能 : 读取24c02的一个地址的一个数据
2、24C02或者24C16进行字节、页读取、页存取
24C02/16存储空间大小
24C02就是有2Kbit = 2000/8 = 250个字节,24C16就是有16kbit = 2000个字节,24C02一页最多可以写入8个字节,因此可以分成32页,24C16一页最多可以写入16个字节,因此可以分成128页。
1、字节写操作
void WriteByte_24LC16B(unsigned char input)
{
unsigned char bit_count;
for(bit_count=8;bit_count!=0;bit_count–)
{
_delay(2);
SDA=(_Bool)(input&0x80);
_delay(2);
SCL=1;
_delay(2);
SCL=0;
input=input<<1;
_delay(2);
}
SDA=1;
SDA_CTRL=1;//这里需要看自己使用的芯片设置SDA的IO口为输入状态,我用的是HT45F67芯片,SDA端口设置为输入状态,用于判断SDA是否接到主机的应答信号
_delay(2);
SCL=1;
_delay(2);
if(SDA == 1)
ack = 0;
else
ack = 1;
SCL=0;
SDA_CTRL=0; //此处根据自己所使用的芯片将SDA所在的Io口设置为输出状态
}
void Write_24LC16B(unsigned char Wdata,unsigned int RomAddress)
{
unsigned char block;
WriteDeviceAddress=0B10100000;
block=RomAddress/256;
RomAddress=RomAddress%256;
WriteDeviceAddress=WriteDeviceAddress|(block<<1);
i2cStart();
WriteByte_24LC16B(WriteDeviceAddress);
WriteByte_24LC16B((unsigned char)RomAddress);
WriteByte_24LC16B(Wdata);
i2cStop();
_delay(5500);
}
2、字节读操作
unsigned char ReadByte_24LC16B()
{
unsigned char bit_count,rbyte=0;
SDA=1;
SDA_CTRL=1;
_delay(10);
for(bit_count=8;bit_count!=0;bit_count–)
{
rbyte=rbyte<<1;
_delay(2);
SCL=1;
rbyte=rbyte|((unsigned char)(SDA));
_delay(2);
SCL=0;
_delay(2);
}
SDA_CTRL=0;
return(rbyte);
}
unsigned char Read_24LC16B(unsigned int RomAddress)
{
unsigned char output,block;
ReadDeviceAddress=0B10100001;
WriteDeviceAddress=0B10100000;
block=RomAddress/256;
RomAddress=RomAddress%256;
WriteDeviceAddress=WriteDeviceAddress|(block<<1);
ReadDeviceAddress=ReadDeviceAddress|(block<<1);
i2cStart();
WriteByte_24LC16B(WriteDeviceAddress);
WriteByte_24LC16B((unsigned char)RomAddress);
i2cStart();
WriteByte_24LC16B(ReadDeviceAddress);
output=ReadByte_24LC16B();
i2cNoAck_MCU();
i2cStop();
_delay(2000);
return(output);
}
3、页写操作
Wdata为输入数组的首地址,RomAddress为需要进行存储的地址,范围在0~2047之间,cnt为一次需要写入的字节个数,建议采用8的倍数的cnt,因为本函数不采用自动分页,不是8的倍数会在超出页写入最多的字节数之后覆盖掉原来的数。
void WritePage_24LC16B(unsigned char *Wdata,unsigned int RomAddress,unsigned char cnt)
{
unsigned char block;
WriteDeviceAddress=0B10100000;
block=RomAddress/256;
RomAddress=RomAddress%256;
WriteDeviceAddress=WriteDeviceAddress|(block<<1);
i2cStart();
WriteByte_24LC16B(WriteDeviceAddress);
WriteByte_24LC16B((unsigned char)RomAddress);
while(cnt–)
{
WriteByte_24LC16B(*Wdata++);
}
i2cStop();
}
注意:连续进行多页写操作,需要在WritePage_24LC16B函数后添加150μs以上的延迟,这段时间,24C02内部需要将数据存储到芯片内部。
例子:
D_buffer[8] = {1,2,3,4,5,6,7,8};
WritePage_24LC16B(D_buffer,0,8);
_delay(150); //延迟150μs以及以上
WritePage_24LC16B(D_buffer,8,8);
4、页读操作
void ReadPage_24LC16B(unsigned char *Rdata,unsigned int RomAddress,unsigned char cnt)
{
unsigned char block;
ReadDeviceAddress=0B10100001;
WriteDeviceAddress=0B10100000;
block=RomAddress/256;
RomAddress=RomAddress%256;
WriteDeviceAddress=WriteDeviceAddress|(block<<1);
ReadDeviceAddress=ReadDeviceAddress|(block<<1);
i2cStart();
WriteByte_24LC16B(WriteDeviceAddress);
WriteByte_24LC16B((unsigned char)RomAddress);
i2cStart();
WriteByte_24LC16B(ReadDeviceAddress);
while(cnt>1)
{
*Rdata++ = ReadByte_24LC16B();
cnt–;
i2cAck_MCU();//发送完读地址后,需要应答一下
}
*Rdata = ReadByte_24LC16B();
i2cNoAck_MCU();//读取最后一个字节需要非应答
i2cStop();
_delay(2000);
 关注微信
关注微信